Elektromagnetilised võnkumised
Mehaanikas käsitlesime võnkumisi perioodilise ehk kindla ajavahemiku tagant korduva liikumisega tasakaaluasendi ümber. Mehaanilise võnkumise põhjustab kehale mõjuv tasakaaluasendi poole suunatud jõud, mis tasakaaluasendile lähenemisel liikumist kiirendab, sellest asendist kaugenemisel aga pidurdab.
Nähtust kus perioodiliselt (või peaaegu perioodiliselt) muutuvad elektrilaeng, pinge, voolutugevus, ja/või mis tahes teine elektromagnetvälja kirjeldav füüsikaline suurus, nimetatakse elektromagnetvõnkumisteks.
Elektromagnetvõnkumiste ajal toimub pidevalt elektrivälja energia muundumine magnetvälja energiaks ja vastupidi.
Nagu mehaanilised võnkumised jagunevad ka elektromagnetvõnkumised vabavõnkumisteks ja sundvõnkumisteks.
Elektromagnetilised vabavõnkumised toimuvad süsteemisiseste protsesside koostoimel, sundvõnkumisi aga põhjustab süsteemiväline perioodiliselt muutuv elektromotoorjõud.
Suletud võnkering
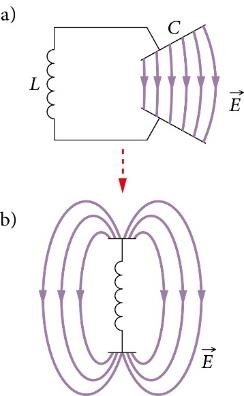
Elektromagnetilised vabavõnkumised tekivad mahtuvust (kondensaator, C) ja induktiivsust (raudsüdamikuga pool, L) sisaldavas vooluahelas – võnkeringis.
Elektromagnetilised vabavõnkumised tekivad tühjeneva kondensaatori ja poolis tekkiva ekstravoolu koosmõjus kus:
 |
· esimese veerandperioodi jooksul püüab laetud kondensaatori tühjenemisvool ületada pooli ekstravoolu
· teise veerandperioodi jooksul takistab ekstravool kondensaatori tühjenemisvoolu kadumist – kondensaator laadub esialgsega võrreldes vastupidiselt · kolmanda veerandperioodi jooksul püüab algsega vastupidiselt laetud kondensaatori tühjenemisvool ületada pooli ekstravoolu · Neljanda veerandperioodi jooksul takistab ekstravool kondensaatori tühjenemisvoolu kadumist – kondensaator laadub selliselt nagu protsessi alguseski. |
Kirjeldatud tsükli kestus – vabavõnkumise periood – on arvutatav valemist:

kus T – vabavõnkumiste periood, L – (induktiivpooli) induktiivsus, C – (kondensaatori) mahtuvus.
Elektromagnetlaine mõiste
Mehaanikas nimetati laineks keskkonnas levivaid võnkumisi. Laine tekkimise eeldusteks oli elastse keskkonna olemasolu ning selles keskkonnas aset leidev võnkumine.

Kui mingis ruumipunktis tekib muutuv elektriväli (või ka magnetväli), siis põhjustab see muutuva magnetvälja (elektrivälja) tekkimise selle punkti vahetus ümbruses. See omakorda põhjustab oma naabruses muutuva elektrivälja (magnetvälja) tekkimise jne jne.
Ruumis tekib teineteisega seotud ja üha suuremat ruumiosa haarav teineteisega seotud elektri- ja magnetväljade süsteem, mida nimetatakse elektromagnetlaineks.
Kuna elektriväli ega ka magnetväli ei vaja levimiseks keskkonda, saab ka elektromagnetlaine levida täielikus tühjuses ehk vaakumis. Veelgi enam, vaakumis on elektromagnetlaine levimise kiirus kõige suurem – absoluutkiirus (c=3∙108m/s)
Elektromagnetlaine ristlainelisus
Saab näidata, et ruumis levivad elektri- ja magnetväljad on risti mitte ainult teineteisega, vaid ka laine levimise suunaga – seepärast öeldaksegi, et elektromagnetlaine on ristlaine

Elektromagnetlaine lainepikkus on lähim kaugus kahe punkti vahel kus elektri(või magnet)väli muutub samas faasis.
Elektromagnetlainete tekkimine. Avatud võnkering
 Elektromagnetlainete tekkimiseks on tarvis mingis ruumi punktis kutsuda esile elektri- või magnetvälja perioodiline muutumine – see tähendab, peab esinema elektromagnetvõnkumine.
Elektromagnetlainete tekkimiseks on tarvis mingis ruumi punktis kutsuda esile elektri- või magnetvälja perioodiline muutumine – see tähendab, peab esinema elektromagnetvõnkumine.
Suletud võnkeringis (a) on ajas muutuv elektriväli „vangistatud“ kondensaatorisse, muutuv magnetväli aga induktiivpooli – mõlemad väljad on lokaalsed ja ei saa seetõttu levida.
Vaata Java animatsiooni fyysika.ee kodulehelt
Selleks, et elektromagnetväli saaks levida elektromagnetlainena, tuleb elektri(või ka magnet)välja muutumine võnkeringist „välja lasta“ – tuleb moodustada avatud võnkering (b).
Elektromagnetlaine tekkimise eelduseks avatud võnkeringis ongi kiirendusega liikuva laengu olemasolu. Kuna võnkeringi läbib erineval ajahetkel erineva tugevuse ja suunaga vool, siis ei liigu võnkeringis laengud ühtlaselt vaid kiirendusega.

Elektromagnetlained avastas 1887. aastal saksa füüsik Heinrich Hertz, kes tekitas elektrilaengute võnkumise kahe metallvarda abil, mille otstes olid erinimeliselt laetud kuulid. Kui kuulikeste vahel tekkis säde, märkas Hertz, et samasugune säde tekkis ka kuulikestest eemal asuvas juhtmekeerus – elektromagnetväli levis lainena ühest ruumi punktist teise.
Elektromagnetlainete skaala
Sõltuvalt lainega edasikantavast energiahulgast (laine sagedusest/lainepikkusest) liigitatakse elektromagnetlained alaliikideks:
- madalsageduslained
- raadiolained
- optiline kiirgus (mis omakorda jaguneb infravalguseks, nähtavaks valguseks ja ultravalguseks)
- röntgenkiirgus
- gammakiirgus
| Elektromagnetlaine liik |
Sagedus f (Hz) |
Lainepikkus λ (m) |
||
|
min |
max | max |
min |
|
| Madalsageduslained |
alla 104 |
üle 104 |
||
| Raadiolained |
105 |
1012 | 104 |
10-4 |
| Optiline kiirgus |
1012 |
1017 | 10-4 |
10-9 |
| Infravalgus |
10-3 |
3,80∙10-7 |
||
| Nähtav valgus |
7,60∙10-7 |
3,80∙10-7 |
||
| Ultravalgus |
7,60∙10-7 |
10-9 |
||
| Röntgenkiirgus |
1016 |
1019 | 10-9 |
10-12 |
| Gammakiirgus |
üle 1019 |
alla 10-12 |
||
NB! Paneme tähele, et elektromagnetlainete skaala piirkonnad on kokkuleppelised ning teatud ulatuses erinevat liiki lainete lainepikkused/sagedused kattuvad.
Elektromagnetlainete kiirus, lainepikkus ja sagedus
Saab näidata, et ühe võnkeperioodi kestel läbib elektromagnetlaine ühe lainepikkusega võrdse vahemaa – ehk laine levimise kiirus on võrdeline laine lainepikkusega ning pöördvõrdeline võnkeperioodiga. Periood omakorda on pöördvõrdeline sagedusega, mistõttu laine levimise kiirust saame leida:

Kuna kõik elektromagnetlained, sõltumata nende lainepikkusest, levivad vaakumis ühesuguse kiirusega – absoluutkiirusega (c=3,0∙108m/s), siis:

ehk laine lainepikkus (λ) ja sagedus (f) on teineteisega pöördvõrdelised:

Elektromagnetlainete amplituud ja intensiivsus
Elektromagnetlaine amplituud (st elektromagnetvõnkumiste ulatus) on seotud lainekomponentideks olevate elektri- ja magnetväljade intensiivsuse muutumisega ajas.
Kirjeldagu elektri ja magnetvälja muutumist elektromagnetlaines võrrandid (mis mõlemad peaksid rangelt võttes olema vektorvõrrandid):
kus E – elektrivälja tugevus suvalisel ajahetkel t, Em – elektrivälja tugevuse amplituudväärtus (maksimumväärtus), B – magnetvälja magnetinduktsioon suvalisel ajahetkel t, Bm – magnetinduktsiooni amplituudväärtus (maksimumväärtus) ning ω – elektromagnet võnkumiste ringsagedus (ω =2πf)
Suurust, mis iseloomustab pinnaühikule langeva elektromagnetenergia hulka, nimetatakse elektromagnetlaine intensiivsuseks.
Koolifüüsika kursuses kirjeldatakse elektromagnetlainet peamiselt läbi elektrivälja muutuse, seega omab elektromagnetlaine amplituudi kirjeldamisel tähtsust vaid elektrivälja tugevuse maksimaalne ehk amplituudväärtus Em.
Kuna elektromagnetlaines muutub elektrivälja tugevus väga suure sagedusega, kasutatakse selle kirjeldamiseks väljatugevuse ruutkeskmist väärtust – elektrivälja tugevuse vektori mooduli ruudu keskmist väärtust ühe võnkeperioodi jooksul.

Seega on elektromagnetlainete intensiivsus on võrdeline elektrivälja tugevuse ruutkeskmise väärtusega .
Elektromagnetvälja intensiivsuse ühikuks on vatti ruutmeetri kohta (1 W/m2).
Saab näidata, et elektromagnetlaine energia on võrdeline selle laine sagedusega (pöördvõrdeline lainepikkusega). Seega on ka elektromagnetine intensiivsus ja sellest tulenevalt ka levimisvõime võrdeline selle laine sageduse ruuduga. Mida suurema sagedusega (väiksema lainepikkusega) on elektromagnetlaine, seda suurem on tema läbitungimise võime.
Elektromagnetlainete peegeldumine, murdumine, difraktsioon, interferents ja polarisatsioon
Elektromagnetlainetele on omased samad nähtused kui mehaanilistele lainetele.
Ka elektromagnetlained levivad homogeenses keskkonnas sirgjooneliselt. Sattudes kahe keskkonna eralduspinnale, muudab laine (sh elektromagnetlaine) oma levimise suunda. Kui laine jätkab peale suunamuutust levimist samas keskkonnas, nimetatakse nähtust laine peegeldumiseks.
Peegeldumisel kehtib peegeldumisseadus:

(1) laine langemisnurk on alati võrdne peegeldumisnurgaga
(2) langev kiir, peegeldunud kiir ning langemispunktist tõmmatud pinnanormaal asuvad alati samal tasapinnal
Peegeldumisseadus kehtib mistahes kujuga keskkondade lahutuspindade (mitte ainult tasapinna) korral.
Kui laine läbib keskkondade eralduspinna ja jätkab muutunud suunas levimist teises keskkonnas, nimetatakse vastavat nähtust laine murdumiseks. Murdumine on tingitud asjaolust, et erinevates keskkondades levib laine erineva kiirusega (erinevates keskkondades on laine lainepikkus erinev).
Murdumisel kehtib murdumisseadus:

(1) laine langemisnurga ja murdumisnurga siinused suhtuvad teineteisesse nagu lainete levimise kiirused vastavates keskkondades:
(2) langev kiir, murdunud kiir ning langemispunktist tõmmatud pinnanormaal asuvad alati samal tasapinnal.
Ka murdumisseadus kehtib mistahes kujuga keskkondade lahutuspindade korral.
Kuna valgus on elektromagnetlaine, siis kõik valguse peegeldumise ja murdumisega seotud nähtused on samuti selgitatavad peegeldumis- ja murdumisseaduste abiga.
Difraktsioon on laine kõrvalekaldumine sirgjoonelisest levimisest ning kandumine tõkke taha. Difraktsioon on kõige paremini jälgitav kui tõkke mõõtmed on samas suurusjärgus laine lainepikkusega. Nii võib mõne elektromagnetlaine jaoks olla difraktsiooni esile kutsuvaks tõkkeks Maa (suurema lainepikkusega raadiolained saavad levida mitte pelgalt sirgjooneliselt vaid saavad difraktsiooni tõttu “kõverduda” ümber Maa), teistele aga molekulid või aatomid (röntgenkiirguse abil on võimalik “pildistada” kehade kristallstruktuuri – tegu pole mitte fotoga kristallist, vaid kristallil tekkiva röntgenkiirguse difraktsioonpildiga).
![HaliteLaue[001]bs](https://opik.kirsman.ee/wp-content/uploads/2019/06/halitelaue001bs.png?w=700)
Fotol on soolakristallil (NaCl) tekkinud difraktsioonpilt
Kui mingis ruumipunktis on mitu lainet, siis nende lainete mõjud liituvad. Lainete liitumist uueks resultantlaineks nimetatakse interferentsiks.
Interfereeruda saavad ainult koherentsed (so ajas muutumatu käiguvahega) lained.
Kui lainete käiguvahe erineb lainepikkusest täisarv korda – liituvad lained on samas faasis (samades ruumipunktides kohtuvad lainete põhjad ja harjad), siis liituvad lained võimendavad üksteist.

Kui käiguvahe erineb lainepikkusest poolarv korda – liituvad lained on vastandfaasis (samades ruumipunktides kohtuvad ühe laine põhjad ja teise harjad), siis liituvad lained nõrgendavad üksteist.

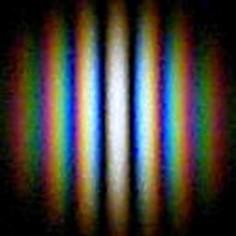
Kahest (suhteliselt laiast) pilust läbi läinud punase valguse interferentspilt – heledamates piirkondades on valguslained teineteist võimendanud, tumedamates piirkondades aga nõrgendanud.
Tavaliselt puudub ristlainetes üks eelistatud osakeste võnkesiht ning osakesed võnguvad kõigis laine levimissihiga ristuvates sihtides.
Polariseerituks nimetatakse lainet, milles osakesed võnguvad ühes ja samas tasandis – ühes laine levimise sihiga ristuvas sihis. Elektromagnetlainete korral säilivad polariseeritud laines ühes levimise suunaga ristuvas sihis muutuvad elektrivälja tugevuse vektorid:

Polariseeritud valgust kasutatakse 3D projektsioonis, kus kummagi silma jaoks projitseeritakse samale ekraanile pisut erinev pilt.
Et pildid teineteist segama ei hakkaks, on ühe silma jaoks mõeldud pilt polariseeritud horisontaalselt ja teise silma jaoks vertikaalselt. Pilte vaadatakse samuti läbi vastavalt polariseeritud filtrite. Vertikaalne polaroid ei lase endast läbi horisontaalselt polariseerituid valgust ja vastupidi – nii jõuabki kumbagi silma ainult selle silma jaoks mõeldud pilt.

Et “õige” pilt jõuaks “õigesse” silma, tuleb 3D kinodes kanda just selle kino jaoks valmistatud teineteise suhtes pööratud polaroidfiltritega prille.
Optika – õpetus valguse tekkimisest, levimisest ja kadumisest
Valgus on elektromagnetlaine, mille lainepikkus jääb vahemikku 380 … 760nm.
On kindlaks tehtud, et erineva sagedusega/lainepikkusega valguslained tekitavad silmas erineva värviaistingu. Erinevate inimeste silmades tekitab sama lainepikkusega valgus erinevaid aistingud – seega on värvide tajumine subjektiivne.
Kokkuleppeliselt loetakse kõige madalama sagedusega ca 395THz (vaakumis kõige pikema lainepikkusega kuni 760 nm) laineid punasteks ning suurima sagedusega ca 790THz (lühima lainepikkusega laineid alates 380 nm) violetseteks, kõik ülejäänud värvid jäävad nende vahele.
| VÄRVUS | LAINEPIKKUS (nm) |
| PUNANE | 760 … 630 |
| ORANŽ | 629 … 600 |
| KOLLANE | 599 … 570 |
| ROHELINE | 569 … 520 |
| HELESININE | 519 … 470 |
| SININE (INDIGO) | 469 … 420 |
| VIOLETNE (LILLA) | 419 … 380 |
Värvuste järjekorda skaalal (alates pikemalinelisemast) aitab meeles pidada järgmine „lause“: Peetri onu käib reedeti harilikult saunas vihtlemas (NB! Võrdle sõnade esitähti värvusskaala esimeste tähtede järjekorraga!)
Valguse difraktsioon, interferents ja polarisatsioon
Kuna valgus on elektromagnetlaine, siis on lainelisusega seletatavad nähtused nagu difraktsioon, interferents ja polarisatsioon jälgitavad ka valguse korral.
 Valguse difraktsioon – kõrvale kaldumine sirgjoonelisest levimisest ning kandumine tõkke taha – on kõige paremini jälgitav, kui tõkke mõõtmed jäävad samasse suurusjärku valguse lainepikkusega ehk 10-6 … 10-8 m.
Valguse difraktsioon – kõrvale kaldumine sirgjoonelisest levimisest ning kandumine tõkke taha – on kõige paremini jälgitav, kui tõkke mõõtmed jäävad samasse suurusjärku valguse lainepikkusega ehk 10-6 … 10-8 m.
Osutub, et sobivateks tõketeks on meie ripsmed. Kui vaadata valget valgusallikat läbi ripsmetega poolsuletud silmade, näeme valgusallikat ümbritsevas spektrivärve. Valguse „lõhustumine“ spektriks ongi siin seletatav valguse difraktsiooniga paljudel ripsmekarvadel.

Analoogiliselt töötab ka seadeldis – difraktsioonvõre – mis saadakse kui läbipaistvale kelmele joonestatakse tihedalt üksteise kõrvale lugematul hulgal läbipaistmatuid jooni. Oluline on, et joone ega ka joonte vahe laius ei ületaks oluliselt 1μm.
Valguse difraktsiooniga on selgitatav ka kummaline asjaolu, et valgusega samades mõõtmetega ketta varjupiirkonna keskele tekivad erineva intensiivsusega valgustatud piirkonnad, peenikesest ringikujulisest avast läbi läinud valgusvihu keskel leiame aga rõngakujulised varjupiirkonnad.

Valguslaigud varju keskel |
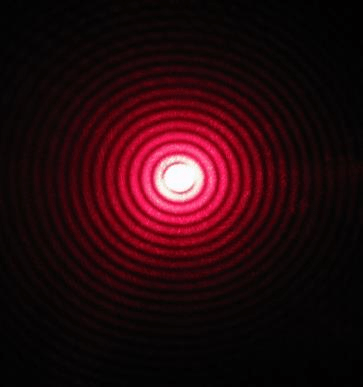
Varjupiirkonnad valguslaigus |
Kui ühes ja samas ruumipunktis on korraga mitu koherentset (sama sageduse ja muutumatu käiguvahega) valguslainet, siis toimub selles ruumipunktis nende lainete liitumine resultantlaineks – interferents.
Tavaliste valgusallikate valgus ei ole koherentne, mistõttu nende korral on valguse interferents raskesti jälgitav.
Siiski saame interferentsi abil kirjeldada värvilise õlilaigu tekkimist märjal asfaldil.


Värviline õlilaik märjal asfaldil on seletatav kahe valguslaine – allikast lähtuva ning veekihilt peegelduva – liitumisena.
Erilise valgusallika – LASER’i poolt kiiratav valgus on koherentne ning tema abil on nii interferentsi (kui ka difraktsiooni) nähtused hästi jälgitavad.
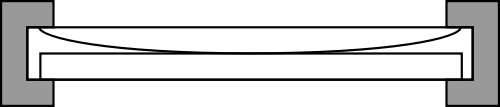
Valguse interferentsiga saame kirjeldada nn Newtoni rõngaste tekkimist klaasplaadist ning sellel asuvast tasakumerast läätsest koosnevas süsteemis.

Newtoni rõngad monokromaatilises valguses |
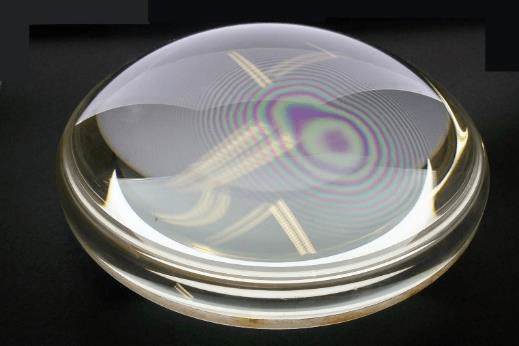
Newtoni rõngad valges valguses |
Kui Newtoni rõngad tekivad optilistes süsteemides, on see soovimatu nähtus ning halvendab otiliste süsteemide kvaliteeti.
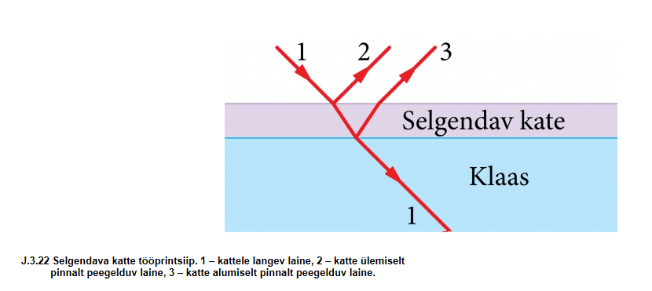
Nähtuse vältimiseks kaetakse optilised seadmed (objektiivid) erilise kilega – selgendava kattega, kus valgus peegeldudes kile mõlemalt pinnalt ning (2) ja (3) peegeldunud laine on teineteisega vastandfaasides kustutab teineteist ning soovimatut peegeldust ei esine.
Loomulik valgus on segu erinevate lainepikkustega ja erinevas sihis võnkuvatest väljadest. Valgust, milles elektrivälja võnkesiht muutub kaootiliselt nimetatakse polariseerimata valguseks. Valguslainet, milles elektrivälja võnkesiht jääb alati samaks, kutsutakse lineaarselt polariseeritud valguseks
Nähtust, kus valguslainest “lõigatakse” välja kõik elektrivälja tugevuse vektori võnketasandid peale ühe, nimetatakse valguse lineaarseks polarisatsiooniks. Valgus polariseerub erinevates nähtuses – näiteks valguse peegeldumisel või osalisel neeldumisel polarisatsioonifiltrites.
Polarisatsioonifiltrid ehk lihtsalt polarisaatorid on seadmed, mis muudavad tavalise valguse polariseeritud valguseks. Lihtsaim polarisaator koosneb tihedast ühesuunalisest traatvõrgust. Seda läbiv valgus polariseerub nii, et elektrivälja vektor on risti traatide suunaga. Mitmetel materjalidel – kaltsiit, islandi pagu jt.
 Juuresolev foto on pildistatuid läbi polariseeriva filtri – parempoolsel akna fotol blokeeris filter klaasilt peegelduva polariseeritud valguse ning jääb mulje, nagu seal ei oleksi aknaklaasi, kuigi vasakpoolsel, ilma filtrita tehtud fotol on klaas selgelt näha.
Juuresolev foto on pildistatuid läbi polariseeriva filtri – parempoolsel akna fotol blokeeris filter klaasilt peegelduva polariseeritud valguse ning jääb mulje, nagu seal ei oleksi aknaklaasi, kuigi vasakpoolsel, ilma filtrita tehtud fotol on klaas selgelt näha.
3D filmide projekteerimine ja vaatlemine põhineb samuti valguse polarisatsioonil. Kummagi silma jaoks projitseeritakse ekraanile oma pilt, kusjuures vastavaid pilte edastavad valgusvihud on teineteise suhtes polariseeritud ristuvates sihtides.

3D pildi vaatamiseks on tarvis polaroidprille – mõlema silma jaoks just selle silmale edastatava pildi polarisatsioonile vastava sihiga – nii pääseb silma ainult selle silma jaoks mõeldud pilt, teise silma pilt aga “lõigatakse” ära.
Raadioside
Mikrofon. Kõlar
Hääleks (heliks) nimetatakse õhus (või muus keskkonnas) levivaid pikilaineid, mille võnkesagedus jääb vahemikku 20 … 20 000 Hz. Häälelained, kui ei ole just tegemist väga valju (suure amplituudiga) võnkumistega sumbuvad keskkonnas kiiresti.
Selleks, saata häälele vastavaid võnkumisi kaugete vahemaade taha, tuleb need esmalt muuta elektromagnetvõnkumisteks.
Selleks kasutatakse mikrofone, kus tekitatakse häälelainete (õhuosakeste võnkumiste) abil tänu seal asuvatele elektromagnetile ning kergesti muudetava elektrijuhtivusega keskkonnale muutuva tugevusega elektrivool.

Mikrofoni tähtsaimad koostisosad on (2) membraan, selle taga asuv (3) kergesti muutuva juhtivusega keskkond (tavaliselt imepeen söepuru), (4) pingestatud pool (elektromagnet) ning (5) ühendusjuhtmed.
Kui (1) häälelained panevad membraani võnkuma, muutub membraani taga asuva keskkonna elektritakistus ning koos sellega ka mähist läbiva voolu tugevus, kusjuures selle voolu muutumise sagedus vastab teda esile kutsunud heli sagedusele, voolu muutumise amplituud aga teda esile kutsunud hääle valjuse muutumisele.
 Kui soovitakse mikrofonis tekkinud voolu saata lühema või ka pikema maa taha ning seda seal siis taasesitada, ühendatakse mikrofon tavaliselt võimendiga, kus toimub mikrofonivoolu võnkeamplituudi suurendamine.
Kui soovitakse mikrofonis tekkinud voolu saata lühema või ka pikema maa taha ning seda seal siis taasesitada, ühendatakse mikrofon tavaliselt võimendiga, kus toimub mikrofonivoolu võnkeamplituudi suurendamine.
Võimendatud häälevõnkumistele vastav mikrofonivool suunatakse seejärel juhtmeid pidi kõlaritesse, kus see elektro- ja püsimagneti vastastikmõju tulemusena muudetakse tagasi õhuvõnkumisteks ehk heliks.
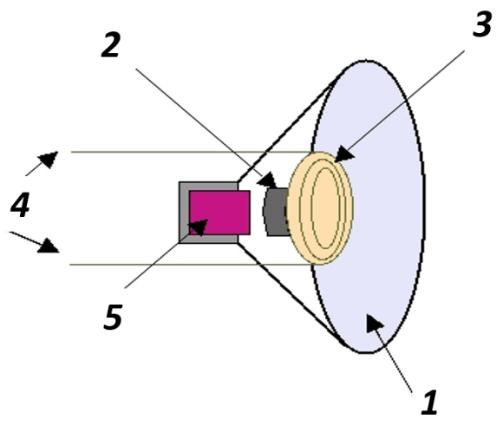
Kõlarid koosnevad (1) võnkuva membraaniga ühendatud (2) ferritsüdamikuga (3) elektromagnetist, mis saab oma toite mikrofoniga (läbi võimendi) ühendatud (4) juhtmetekaudu ning (5) püsimagnetist, mille ülesanne on tekitada muutumatu magnetinduktsiooniga magnetväli, mis mõjutab elektromagneti südamikku.
Kui elektromagnetit läbib mikrofonivool, tekib selles mikrofonivoolu muutumisi (sagedus, amplituud) „peegeldav“ magnetväli ning nii tõmbub või tõukub elektromagneti südamik püsimagnetist samas rütmis ja sarnase amplituudiga, nagu võnkus mikrofoni membraani läheduses olnud õhk.
 Kuna elektromagnet on ühendatud kõlari membraaniga, hakkab koos sellega liikuma ka membraani lähedal olev õhk ning tekivad taas häälelained.
Kuna elektromagnet on ühendatud kõlari membraaniga, hakkab koos sellega liikuma ka membraani lähedal olev õhk ning tekivad taas häälelained.
Peale mikrofonide ja kõlarite leiutamist edastatigi häälega seotud infot lähemate ja kaugemate vahemaade taha läbi juhtmete, mille ühes otsas oli mikrofon, teises aga kõlar. Nii toimis näiteks telefoniside veel 20. sajandi lõpukümnenditelgi.
Raadioside
Tänapäeval kasutatakse häälega seonduva info edastamiseks peamiselt elektromagnetlaineid, mis leiavad laialdast rakendamist eelkõige seetõttu, et nad levivad ülikiiresti (ca 3∙108 m/s) ning ei vaja levimiseks ainelist keskkonda – see tähendab juhet vms.
Enamlevinumaid andmeside edastamise vorme on raadioside, kus elektromagnetlainete abil edastatakse ühest punktist teise helile (häälele) vastavat infot sisaldavat raadiolainete spektrialasse jäävate elektromagnetsignaalide abil.
Antennid
Elektromagnetvõnkumised muudetakse ühes avatud võnkeringis – saatjas(saateantennis) – elektromagnetlaineks ning teises, samale sagedusele (lainepikkusele) häälestatud avatud võnkeringis – vastuvõtjas – toimub nende taasmuundamine elektromagnetvõnkumisteks.

Moduleeritud võnkumised ja lained
Põhimõtteliselt on võimalik ühendada mikrofon saatjaga ning muundada mikrofonivoolule vastavad elektromagnetvõnkumised kohe ka elektromagnetlaineks, kuid kuna taoliselt otsemuundatud lainete võnkesagedus on väike (20 … 20 000 Hz), siis on taoliste lainete saatmine pikemate vahemaade taha tehniliselt äärmiselt tülikas, sest madalsageduslike (suure lainepikkusega) elektromagnetlainete energia on väga väike ning taolised lained vajaksid äärmiselt võimsaid saate- ning ülisuuri vastuvõtuantenne.
Helile vastava võnkumise elektromagnetlainena pikema vahemaa taha edastamiseks, liidetakse mikrofonivoolule vastav madalsageduslik võnkumineehk signaal võnkeringis tekitatud kõrgema sagedusega (kandevsagedus) elektromagnetvõnkumisega.
Taoliselt saadud võnkumisi ja laineid nimetatakse moduleeritud võnkumisteksja moduleeritud laineteks
Eristatakse kahte liiki moduleeritud võnkumisi:
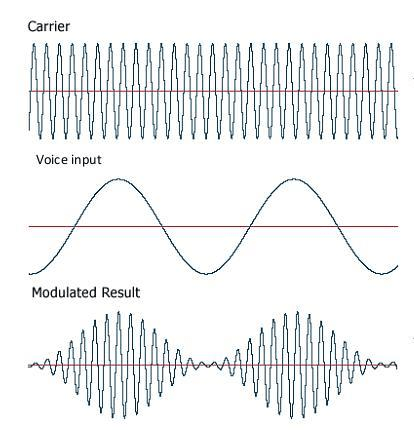
(1) amplituudmodulatsioon (AM) ja
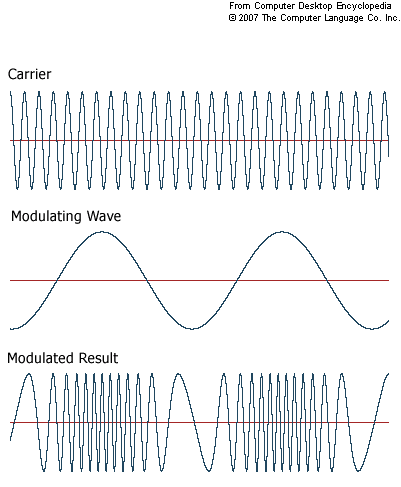
(2) sagedusmodulatsioon (FM)
Amplituudmoduleeritud (AM) võnkumiste ja lainete korral sisaldub edastatav info kandva võnkumise (laine) võnkeamplituudi muutumises.
Sagedusmoduleeritud (FM) võnkumiste ja lainete korral sisaldub edastatav info kandva võnkumise (laine) võnkesageduse muutumises.
AM lained levivad kaugemale (neil on võime peegelduda Maa ionosfäärilt) – nad saavad kanduda Maa kumeruse taha, kuid kuna kasutatakse madalamaid sagedusi (LW (pikklained) – 150 … 300 kHz; MW (kesklained) – 500 … 1600 kHz; SW (lühilained) – 1 700 … 30 000 kHz), on nende poolt edastatava signaali kvaliteet halvem ja andmeedastusmahud väikesed
FM lained saavad levida vaid piirkonnas, kus saatja ja vastuvõtja vahel on „silmside“, kuna kasutatakse suuremaid sagedusi (80+ MHz … GHz), on edastatava signaali kvaliteet parem ja andmeedastusmahud oluliselt suuremad.
FM-lainete levimiskaugus
Kuidas arvutada FM lainete vastuvõtu kaugust?
 Teades saatja-antenni kõrgust Maapinnast ning Maa raadiust R (R≈6400 km =6,4∙106m), on võimalik leida Phytagorase teoreemi kasutades täisnurkse kolmnurga, mille üheks kaatetiks on Maa raadius (R) ja hüpotenuusiks Maa raadiuse ja saatja-antenni kõrguse summa (R+h) teise kaateti pikkus, milleks on kaugus antenni tipust kuni kaugeima punktini, kus antenn on „nähtav“.
Teades saatja-antenni kõrgust Maapinnast ning Maa raadiust R (R≈6400 km =6,4∙106m), on võimalik leida Phytagorase teoreemi kasutades täisnurkse kolmnurga, mille üheks kaatetiks on Maa raadius (R) ja hüpotenuusiks Maa raadiuse ja saatja-antenni kõrguse summa (R+h) teise kaateti pikkus, milleks on kaugus antenni tipust kuni kaugeima punktini, kus antenn on „nähtav“.

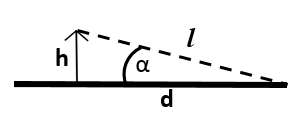 Lugedes Maa pinna tasapinnaks, on võimalik taas täisnurkse kolmnurga seoseid kasutades kauguse mõõdetuna mööda tasapinda saateantennist lainete levimise maksimaalse kauguseni (d):
Lugedes Maa pinna tasapinnaks, on võimalik taas täisnurkse kolmnurga seoseid kasutades kauguse mõõdetuna mööda tasapinda saateantennist lainete levimise maksimaalse kauguseni (d):

Nii on Tallinna teletorn, mille kõrgus on 314m „nähtav“ ca 6,3∙105m =63 km kaugusel. (Tegelikult küll pisut kaugemal, sest kaugus mõõdetuna mööda kerapinda – kaart – on pikem kui mööda tasapinda – sirget – mõõdetud pikkus).
Avatud võnkeringis kiiratava elektromagnetlaine energia on võrdeline võnkesageduse neljanda astmega:

see tähendab suurendades saadetavate lainete võnkumiste sagedust n korda, suureneb laine energia n4 korda. Mida suurem on kiiratava laine energia seda paremini ta levib (st. seda kaugemal on võimalik teda vastu võtta)
Elektromagnetlaine poolt pinnale langeva energia hulk (laine maksimaalne intensiivsus IM) kahaneb saatjast eemaldumisel ruut-pöördvõrdeliselt kaugusega

ehk mida kaugemal saatjast asub vastuvõtja, seda nõrgem signaal temani jõuab.
Radarid
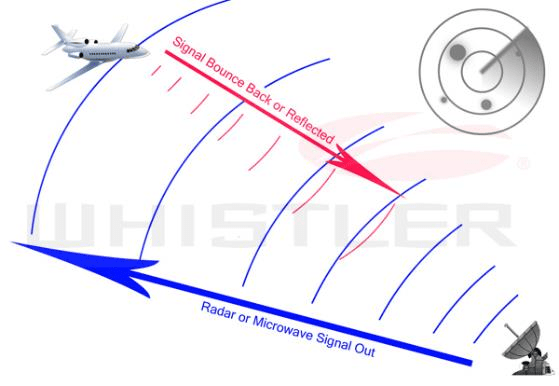
Radar (varem ka RADAR – inglise keeles radio detection and ranging –raadioasukoha ja -kauguse määramine) on raadioseireseadeldis ehk raadiolokaator, mis toimib raadiolainete levimise põhimõttel ruumis. Radarit kasutatakse ruumis asuvate objektide avastamiseks ning nende kauguse, kõrguse, kiiruse ja liikumise suuna määramiseks.
Radari saatja suundantennist kiirguvad kitsasse ruuminurka elektromagnetlaine impulsid. Liikuvalt objektilt peegeldunud (raadio)laine võetakse vastu enamasti sama radari vastuvõtuantenniga, kusjuures peegeldunud (raadio)lainete energia moodustab tavaliselt vaid tühise osa saatja kiirgusenergiast.
Võrreldes omavahel välja saadetud ja vastu võetud laineimpulsside vahele jäävaid ajavahemikke ning saadetud ja vastu võetud lainete sagedusi, on väga täpselt võimalik määrata elektromagnetlaineid peegeldava objekti kaugus ning kiirus.
Kauguse määramiseks tuleb mõõta saadetud ja vastu võetud impulsside vahele jääva ajavahemiku kestus. Kuna elektromagnetlained liiguvad absoluutkiirusega (c≈3∙108 m/s), saab objekti kauguse leida lihtsa tehtega

kus s – kaugus radarist esemeni ja Δt – saadetud ja vastuvõetud impulsi vahele jäänud ajavahemik.
Elektromagnetlaine impulsi poolt läbitud tee on kahekordne seetõttu, et signaal läbib vahemaa vastuvõtjast kuni objektini ning tagasi.
Objekti liikumissuuna kindlaks määramiseks saame kasutada Doppleri efektiga seotud seaduspärasusi. Võrreldes välja saadetud (f0) ning vastu võetavate elektromagnetlainete sagedusi (f), on võimalik kindlaks määrata objekti, millelt radariimpulss peegeldus liikumiskiirus ja –suund:

kus f – vastu võetav sagedus; f0 – allika poolt genereeritav sagedus; v – laine levimise kiirus keskkonnas; us – allika kiirus (us>0 – kui allikas eemaldub vaatlejast), uv – vaatleja kiirus (uv>0 – kui vaatleja läheneb allikale).
Globaalne punktiseire (GPS)
Üleilmne asukoha määramise süsteemehk globaalne punktiseire (lühend GPStuleb ingliskeelsest väljendist Global Positioning System) on satelliitnavigatsiooni süsteem.
GPS-süsteem võimaldab määrata vastuvõtja täpse asukoha ja ülitäpse GPS-ajahetke ka halva ilmaga, igal ajal ja igal pool üle Maa (või selle lähedal), kui vastuvõtja nägemisulatuses on vähemalt neli GPS-satelliiti ja asukoha arvutamiseks kasutatakse GPS-meetodit.
Lisaks arendatakse ja kasutatakse ka teisi GPS süsteeme. Vene Globaalne Navigatsiooni-Satelliidi-Süsteem (GLONASS) oli ainult vene sõjaväe kasutuses aastani 2007, viimasel ajal on see süsteem tehtud kättesaadavaks ka tsiviiltarbijaile. Veel on katsetuses Hiina Kompassi Navigatsiooni-Süsteem ja Euroopa Liidu Galileo satelliitnavigatsiooni süsteem.
GPS asutati ja ehitati USA Kaitseministeeriumi poolt 1973. aastal ning algselt kasutati 24 satelliidilt, mis kõik asusid u 20 000 km kõrgusel, pärinevat infot.
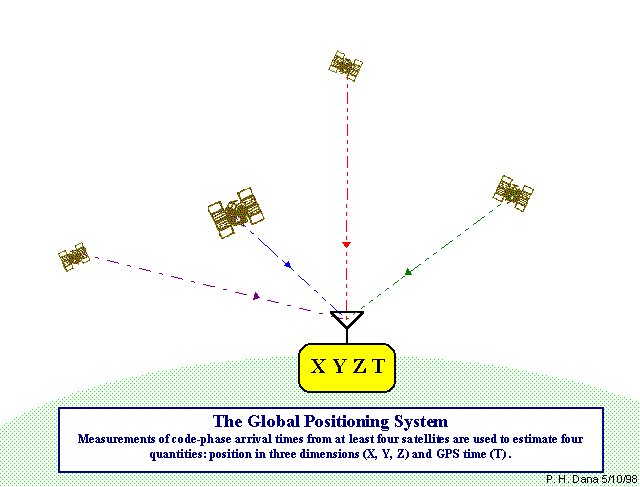
GPS satelliidid saadavad kosmosest välja signaalimpulsse ning iga Maa peal asuv GPS vastuvõtja saab neid signaale kasutada, et leida (arvutada välja) oma asukohta kolm mõõdet: laiuskraad, pikkuskraad ning kõrgus/sügavus maapinnalt, lisaks on võimalik satelliitidelt saadava info põhjal määrata ülitäpselt ajahetke.
Mida rohkem satelliite vastuvõtjale kätte paistab, seda täpsemini saab määrata vastuvõtja asukoha Maa pinnal. Tavakasutaja käsutuses olevad vastuvõtjad määravad asukoha maapinnal mõne meetrise täpsusega. Profiseadmete täpsusklass on mõnikümmend sentimeetrit, militaarkasutuses olevatel väidetavalt veelgi väiksem.
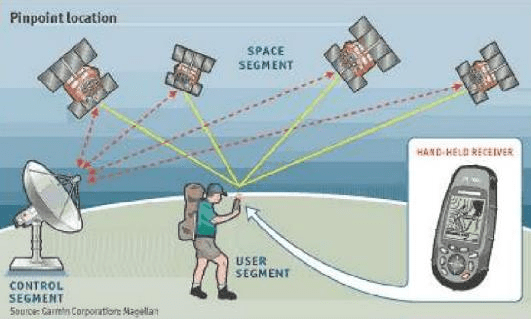
GPS koosneb kolmest osast: (1) kosmoseliides, (2) kontroll-liides ja (3) kasutajalides.
Kosmoseliides koosneb 32 satelliidist, mis kõik tiirlevad geostatsionaarsel – see tähendab Maapinna suhtes muutumatu asukohaga orbiitidel.
Satelliidid on asetatud nii, et nendest 6 oleks vähemalt alati silmaga (vastuvõtjaga) nähtavad peaaegu igas Maailma punktis.
Seda osa GPS-süsteemist arendab, hooldab ja kontrollib USA Õhuvägi.
Kontroll-liides koosneb erinevatesse kohtadesse Maal paigaldatud antennidest ning saatejaamadest. Erinevatesse maailma otstesse paigaldatud antennid ja jaamad sünkroniseerivad üksteise aatomkellasid nanosekundi (10-9s) täpsuseni kasutades selleks maapealseid aatomikellasid, satelliitidelt saabuvat infot ning paljusid teisi lähteandmeid. Kontroll-liidese ülesandeks on garanteerida saatjalt vastuvõtjale edastatava signaali piisav kvaliteet.

Kasutajaliideste hulka kuuluvad sajad tuhanded USA ja teiste NATO riikide militaarkasutajate ning kümnetest miljonitest tsiviilkäibes olevad GPS vastuvõtjad, mida tavakeeles GPS-ideks kutsuma kiputakse.
Igas kasutajaliideses ehk vastuvõtjas on antenn, mis koos temaga ühendatud võnkeringiga on häälestatud sobivale sagedustele, et oleks võimalik vastu võtta satelliitidelt saadetavaid raadiolaineid, samuti sisaldab seade andmetöötlusprotsessorit, et kosmosest satelliitidelt saadud infot töödelda ning veel peab seadmes olema väga täpne kell, mis on sünkroniseeritud kontroll-liidese ja kosmoseliidesega, et võimalikult täpselt oleks määratud saatjatelt vastuvõtjani jõudnud signaali registreerimise hetk. Vastuvõtjates võib olla ka displei, et kuvada kasutajale tema asukoha ja kiiruse infot.
Dualismiprintsiip
Kuni elektromagnetlainete avastamiseni 19. sajandil valitses füüsikute-loodusteadlaste hulgas Newtoni poolt sõnastatud arusaamine, et valgus on eriliste valgusosakeste – korpusklite – voog. Kui 19. sajandil avastati elektromagnetlained, sobisid need hästi selgitama kõiki tuntud valgusnähtusi, mistõttu loobuti üsna kergelt Newtoni korpuskulaarteooriast laineteooria kasuks.
19. saj. lõpus 20. saj. alguses tekkis vajadus kirjeldada erineva temperatuuriga kehade valguse kiirgumist (ja neeldumist) ning avastati, et laetud metallkeha ümbruses tekib elektrisäde lihtsamalt, kui seda mingi kindlat värvi valgusega valgustada. Nende nähtuste uurimise käigus avastatut ei osatud kuidagi laineteooria abil selgitada.
1905. a aastal püstitas Max Planck hüpoteesi, et kuumad kehad ei kiirga valgust mitte pidevalt, vaid üksikute portsjonite – kvantide – kaupa. Selline lähenemine võimaldas statistiliselt täpselt kirjeldada nii erineva temperatuuriga kehade poolt kiiratava valguse värvust (sõltuvust lainepikkusest) kui ka intensiivsust (kiiratava valguse energiat).
Seoses mitmete kvantnähtuste avastamisega kerkis teadlastel taas üles küsimus – kumb siis valgus ikkagi on, kas osakeste voog või laine.
1924. aastal lahendas prantsuse füüsik Louis de Broglie’ selle probleemi elegantselt väites, et igasuguse liikuva kehaga saab siduda erilise laine – mateerialaine (ka tõenäosuslaine, leiulaine), mille lainepikkus on pöördvõrdeline selle keha liikumishulgaga (impulsiga):

kus λ – mateerialaine lainepikkus, h = 6,63∙10-34Js – Plancki konstant ja p =mv – liikuva keha liikumishulk ehk impulss (kus m – keha mass, v – keha kiirus)
Seega on valgusel dualistlik iseloom: teda tuleb teatud olukordades (kui kirjeldame valgust makrotasandil – valguse levimisega seotud nähtused) kirjeldada kui elektromagnetlainet, teistes olukordades (kui kirjeldame valgust mikrotasandil – valguse kiirgumisega ja neeldumisega seotud nähtused) aga kui valgusosakeste – footonite – voogu.
Footon. Footoni energia
Planck näitas teoreetiliselt, et ühe sellise energiaportsu – kvandi energia sõltub ainult kiiratava valguse sagedusest:
E=hf
kus E – kvandi energia; f – kiiratava valguse sagedus ning h=6,6261∙10-34 Js – Plancki konstant.
Et valguse kiirus c=λf, siis võime kvandi energia esitada ka valguse lainepikkuse kaudu:

kus c=3∙108 m/s – valguse kiirus vaakumis ja λ – valguse lainepikkus.
Valguse kvante hakati nimetama footoniteks.

You must be logged in to post a comment.