Sissejuhatus füüsikasse
Maailm. Loodus
Maailm – kõik see, mis ümbritseb konkreetset inimest (meid) samamoodi nagu kõiki teisi inimesi.
Maailmapilt – teadmiste süsteem, millega inimene tunnetab teda ümbritsevat maailma ja suhtestab end sellega.
Loodus – inimest ümbritsev ning temast sõltumatult eksisteeriv keskkond, mis koosneb ainest ja väljast.
Tehiskeskkond – inimest ümbritsev ning tema poolt loodud keskkond.
Kultuur – tehiskeskkonna vaimne (mentaalne) komponent. (kunst, muusika, kirjandusteosed jne)
Loodusnähtus – on looduses aset leidev konkreetne sündmus, omadus või protsess, mis väljendab reaalsuse väliskülgi ja/või esitavad mingit olemuse avaldamise ja väljendamise kuju.
Loodusteadused
Loodusteadused – teadused, mis annavad loodusnähtustele teaduslikke kirjeldusi ja seletusi ning suudavad pädevalt ennustada uute nähtuste olemasolu.
Loodusteadused on geograafia (uurimisobjektiks Maa pind ja sellel toimuvad protsessid), bioloogia (uurimisobjektiks on elusas looduses toimuvad protsessid), keemia (uurimisobjektiks ainete vahelised protsessid) ning füüsika.
Füüsika – loodusteadus, mis uurib looduse põhivormide liikumist ja looduses eksisteerivaid vastastikmõjusid kasutades selleks täppisteaduslikke (matemaatilisi) meetodeid.
Füüsikaline objekt – uurija kui subjekti poolt välja mõeldud ese, nähtus või kujutlus, millega ta parajasti tegeleb ning mis suhtestab kontrollitavalt looduses tegelikult eksisteeriva objektiga. Enamasti käsitletakse füüsikaliste objektidena erinevaid esemeid (ainest koosnevaid) kehi, aga ka vastastikmõjusid vahendavaid välju.
Vaatleja
Vaatleja – iga inimene, kes kogub infot looduse kohta oma meeleorganite (silmad, kõrvad, nina, keel jne) abil. Kuna iga vaatleja poolt kogutav info on subjektiivne ja unikaalne, on seetõttu igal vaatlejal oma maailm, oma aeg, oma ruum.
Vaatleja tunnused – vaatleja olulisteks tunnusteks on: vaba tahte olemasolu, aistingute saamise võime, võime salvestada infot ja seda hiljem uuesti kasutada (mälu) ning võime konstrueerida olemasoleva info põhjal mõtteseoseid.
Füüsikaline tunnetusprotsess
Tunnetusprotsessi saame kirjeldada järgimstest etappidest koosnevana
(1) Looduses leiab aset mingi vaadeldav sündmus
(2) Sündmust kirjeldav info (signaal) jõuab vaatlejani
(3) ning võetakse vastu erinevate retseptorite abil kus signaal muundatakse elektrisignaaliks (NB! enamasti sisaldab see info moonutusi)
(4) mis saadetakse mööda närve vaatleja ajju, kus tekib retseptoritelt saadud signaali põhjal sündmust peegeldav aisting
(5) erinevatelt meeleorganitelt saadud info põhjal tekib vaatlejal ümbritsevast terviklik aistingute komplekt ehk taju
(6) kasutades eelnevaid kogemusi ja teadmisi, moodustub tajudest vaatleja ajus terviklik kujutlus (visioon) tema poolt vaadeldavast objektist või nähtusest.
Tunnetusprotsess on visualiseeritud juuresolevas videos
Nähtavushorisont
Nähtavushorisont on piir, milleni vaatlejal (teadlastel) on olemas eksperimentaalselt kontrollitud teadmised füüsikaliste objektide kohta. Eristatakse sisemist- ja välimist nähtavushorisonti. Nende vahele jäävad objektid moodustavad inimkonna (füüsikute) jaoks tuntud maailma. Nähtavushorisontide taha jäävad need objektid, mida pole veel uuritud või mille olemasolust ei olda vajalike vaatlusseadmete puudumise tõttu veel teadlikud.
Sisemine nähtavushorisont on piir, millest väiksemate objektide olemasolu pole inimkonnal (füüsikutel) tänapäeval kasutada olevate vahenditega võimalik pädevalt kirjeldada.
2014. aastal hinnati inimkonna sisemiseks nähtavushorisondiks suurusjärku 10-21 m
Välimine nähtavushorisont on piir, millest suuremate objektide olemasolu pole inimkonnal (füüsikutel) tänapäeval kasutada olevate vahenditega võimalik pädevalt kirjeldada.
2014. aastal hinnati inimkonna välimiseks nähtavushorisondiks suurusjärku 1025 m
Füüsika põhieesmärk ja põhiülesanne
Füüsika ei kirjelda mitte loodust kui objektiivset reaalsust, vaid selle peegeldust (paljude) vaatleja(te ühistes) kujutlustes.
Füüsika põhieesmärk on saavutada parem (täpsem) vastavaus looduse kui objektiivse reaalsuse ning seda peegeldavate kompleksete kujutluste (teooriate) vahel. Selleks et üksiku vaatleja kujutlusest tekiks füüsikaline teooria, peavad seda kinnitama piisav hulk usaldusväärseid eksperimentaalseid fakte.
Füüsika põhiülesanne on määratleda ja nihutada edasi inimkonna kui terviku nähtavushorisonte.
Looduse struktuuritasemed
Looduse struktuuritasemeteks loetakse kokkuleppeliselt kolme taset: mikro-, makro- ja megamaailma.
Makromaailmas kehtivaid füüsikaseadusi saame uurida nägemismeelt kasutades vahetute katsete abil. Erinevate vaatlejate jaoks on makromaailma piirid erinevad, kuid kokkuleppeliselt loetakse makromaailma objektideks neid, mille mõõtmed jäävad 10-6 … 106m vahele. Enamik meid ümbritsevatest kehadest (kivid, puud, majad, mäed, ookean jne) kuuluvad oma mõõtmete poolest makromaailma. Makromaailmas on valdavaks (tähtsaimaks) vastastikmõju liigiks elektromagnetiline vastastikmõju.

Makromaailma objektid on inimmeeltega tunnetatavad
Mikromaailma moodustavad inimesest mõõtmete poolest palju väiksemad objektid. Mikromaailma objektide mõõtmed jäävad 10-21 … 10-6m vahele. Tüüpilisteks mikromaailma objektideks on aatomid, aatomituumad, prootonid, neutronid, elektronid ja teised elementaarosakesed. Mikromaailmas on valdavateks vastastikmõju liikideks tugev- (objektide vaheline kaugus ca 10-15 m) ja nõrk (objektide vaheline kaugus <10-18m) vastastikmõju.

Mikromaailma objektid (pildil erinevalt ergastatud aatomi elektronkate) on inimmeeltega tunnetatavatest objektidest suurusjärkude võrra väiksemad.
Megamaailma moodustavad inimesest mõõtmete poolest palju suuremad objektid. Megamaailma objektide mõõtmed jäävad 106 … 1025m vahele. Tüüpilisteks megamaailma objektideks on planeedid, Päikesesüsteem, tähed, galaktikad jne. Megamaailmas on valdavaks vastastikmõju liigiks gravitatsiooniline vastastikmõju.

Megamaailma kuuluvad objektid on meeltega tajutavatest suurusjärkude võrra suuremad.
Mikro- ja megamaailma objekte ühendab asjaolu, et nende objektidele pole (enamasti) rakendatavad makromaailmas tuntud füüsikaseadused.
Füüsika uurimismeetod
Loodusteaduslik meetod
Meetod on reeglite ning nende rakendamisel kasutatavate võtete kogum, mis võimaldab saavutada teatud eesmärke.
Loodusteaduslik meetodi (sageli nimetatud ka teaduslik meetodi) all mõistetakse tavaliselt meetodit, mille tuumaks on vaatluste või mõõtmiste põhjal hüpoteeside püstitamine, nende põhjal ennustuste tegemine ja ennustuste paikapidavuse kontrollimine korratavate katsete teel.
Üldisemalt on teaduslik meetod tõsikindlate teadmiste saamise üldine viis, kus tõsikindluse saavutamiseks kasutatakse paljusid tõendamise vahendeid, nii empiirilisi kui teoreetilisi.
Vaatlus ja katse


Vaatlemine (Newton õunapuu all) on loodusliku protsessi kohta info kogumine ilma sellesse sekkumata.
Katse ehk eksperiment (Galilei Pisa tornis) on olukord, kus loodusnähtus kutsutakse esile kunstlikult ning protsess toimub kontrollitavates tingimustes.
NB! Olgu siinkohal öeldud, et mõlemad kujundid – Newton õunapuu all ja Galieli Pisa tornis on legendid -nende tegeliku toimumise kohta puudub kindel teave.
Probleem on teaduslikult sõnastatud küsimus. Probleemi sõnastus tugineb enamasti vaatlustest ja katsetest kogutud infol.
Loodusteaduslik meetodi põhimõisted
Hüpotees on teaduslikult sõnastatud oletus kahe või enama loodusnähtuse omavahelise seose kohta, mille paikapidavust hakatakse uute sihipäraste vaatluste ja/või katsetega kontrollima.
Vaatluste ja katsete käigus kogutud matemaatilisel kujul väljendatavatat informatsiooni (vaatlus- ja mõõtmistulemusi) nimetatakse andmeteks. Kogutud andmeid töödeldes (analüüsides) võrreldakse saadud tulemusi ennustustega.
Seaduspärasus on kvalitatiivne, vaatluste ja katsetega kinnitust leidnud hüpotees. Enamasti ei nõua sõnastatud seaduspärasus mõõdetavust vaid rõhutab ainult loodusnähtuse erijooni.
Loodusseadus on loodusnähtuste kohta kehtiv kvantitatiivne ehk mõõdetav ja arvuliselt – matemaatiliste valemite ja/või võrranditega – väljendatav üldistus.
Postulaat on seni mitte kasutuses olnud lähte-eeldus, mis on kooskõlas vaatlusandmetega, kuid mida olemasolevate teadmiste põhjal ei ole võimalik matemaatiliselt või muud moodi tõestada ning millele tuginedes ehitatakse üles uus teooria.
Teooria saab lõpliku tunnustuse, kui sellest lähtunud ennustused on saanud piisavalt eksperimentaalsete faktidega tõestatud.
Eksperimentaalne fakt on selline vaatlus- või katsetulemus, mida on saadud korduvalt erinevate uurijate poolt erinevates tingimustes ja paikades üle maailma.
Teaduslikud käsitlused
Loodusteadusliku käsitluse korral kasutatakse eelistatult kvalitatiivseid (mõõtmisi mitte eeldavaid) hinnanguid ning looduse uurimisel liigutakse üksikult üldisele (deduktiivne meetod), alustades kõige lihtsamast olukorrast ning lisades sellele tasapisi keerukust jõutakse loodusnähtuste olemust kirjeldavate peegelpiltide ehk mudeliteni.
Täppisteaduslik käsitlus on selline looduse uurimise viis, mille käigus kasutatakse kvantitatiivseid (valemitega esitatavaid) järeldusi, püüdes kõigepealt esitada matemaatilised reeglid ning kohandada neid seejärel konkreetsete probleemide lahendamiseks. See tähendab liigutakse üldiselt üksikule (induktiivne meetod), püüdes esmalt formuleerida loodusseadusi ning alles seejärel neid rakendada.
Kuna füüsikalist infot meid ümbritseva looduse kohta saadakse läbi erinevate aistingute, võime öelda, et füüsika on oma olemuselt ka empiiriline ehk kogemuslik teadus.
Füüsikaline suurus. Mõõtmine
Füüsikaline suurus on füüsikalise objekti mingi omaduse kirjeldus, mida on võimalik väljendada arvuliselt. Füüsikalisi suurusi mõõdetakse vaatluste ja katsete käigus. Füüsikaline suurus on paljude vaatlejate ühine kokkuleppeline kujutlus – loodusobjekti mudel.
Skalaarseteks nimetatakse selliseid füüsikalisi suurusi, mis on kirjeldatavad ainult arvväärtuse ja mõõtühiku abil. Skalaarsed suurused on näiteks mass (5kg), pikkus (33km), ajavahemik (2h), voolutugevus (25mA) jne.
Vektoriaalsete suuruste puhul on lisaks nende arvväärtusele oluline ka nende suund. Vektoriaalseteks suurusteks on põhikooli kuruses käistletutest näiteks kiirus (liikumine kiirusega 10 m/s lõunasse viib 1 minutiga sootuks teise kohta kui 10m/s itta), jõud (liikuvale kehale mõjuv jõud 7kN suunaga vasakule mõjutab liikumist teisiti kui jõud 7kN suunaga alla).
Mõõtmine on füüsikalise suuruse võrdlemine suurusega, mis on võetud vastava suuruse etaloniks (mõõtühikuks). Mõõtmise käigus antakse füüsikalisele suuruse väärtusele põhjendatud hinnang.
Mõõtesuurus on füüsikalise objekti (nähtus, keha, aine) oluline omadus, mida saab kvalitatiivselt (see tähendab mingisuguste oluliste tunnuste põhjal) eristada ning kvantitatiivselt määrata (see tähendab leida selle arvväärtust).
Mõõtmistulemus on mõõtmise teel saadud mõõtesuuruse väärtus.
Mõõtmistulemus esitatakse korrutisena, mis koosneb alati kahest osast – mõõtarvust (näitab mitu korda erineb mõõdetud suurus etalonist) ja mõõtühikust (vastava mõõtesuuruse etalon, millega mõõdetavat objekti võrreldi).
Pikkus: l = 5 x 1m = 5m
Mass: m = 25 x 1kg = 25kg
Mõõtühikuteks peavad olema looduses muutumatuna püsivad suurused.
Otsene ja kaudne mõõtmine

Otseseks mõõtmiseks nimetatakse mõõtmist, kus füüsikalist suurust võrreldakse etaloniga (mõõtühikuga) vahetult. Otsese mõõtmise puhul loetakse mõõtmistulemus vastava mõõteriista skaalalt.
Kaudseks mõõtmiseks nimetatakse mõõtmist, kus mõõdetakse füüsikalise objekti mingeid teisi omadusi kirjeldavaid suurusi ning vajalik suurus arvutatakse nende kaudu.
Mõõteriistad. Kalibreerimine. Taatlemine
Nii otsestel kui ka kaudsetel mõõtmistel kasutatakse mõõtevahendeid (mõõteriistu) – need on kindlate omadustega tehnilised seadeldised, mida saab kasutada vastavate mõõtmiste sooritamiseks kas eraldiseisvana või koos lisaseadmetega.
Loodusteaduslikke mõõtmisi reguleerivat teadusharu nimetatakse metroloogiaks.
Igapäevaelus aset leidvaid mõõtmisi reguleerib Riigikogu poolt 2004. aastal kehtestatud mõõteseadus, mille kohaselt ebakorrektsete mõõtmiste alusel esitatud pretensioon on olemuslikult õigustühine. Mõõteseadus reguleerib Rahvusvahelisele Mõõtühikute Süsteemile (SI) vastavate ühikute kasutamise Eesti Vabariigis, mõõtmistulemuste jälgitavuse tõendamise põhimõtted, mõõtevahendite kontrolli ja taatlemise ning mõõtmistegevuse riikliku järelevalve korralduse.
Kalibreerimine on menetlus, mis fikseeritud tingimustel määrab kindlaks seose mõõtevahendiga saadud väärtuse ja etaloni abil realiseeritud füüsikalise suuruse vastava väärtuse vahel. Kalibreerimise eesmärk on tagada konkreetse mõõteriista kasutades usaldusväärsed mõõtetulemused.

Fotol olev politseinik mõõdab kiirust taadeldud radariga. Seda kinnitab radaril olev kleebis.
Taatlemine on protseduur, mille käigus pädev labor kontrollib mõõtevahendi vastavust kehtestatud nõuetele ja märgistab nõuetele vastava mõõtevahendi taatlusmärgisega. Taatlemise eesmärgiks on kaitsta kodanike ja riigi huvisid ebaõigete mõõtmiste kaudu tekkida võivate kahjude eest.
Mõõtühikute süsteemid
Mõõtühikute süsteem on kokku lepitud põhiühikutest ning nendest tuletatud ühikutest moodustatud kogum, mida erinevad mõõtjad saavad teineteisest sõltumatult kasutada.
Mõõtühikuid, mille etalonid tulenevad inimesega või loodusega seotud omadustest, nimetatakse loomulikeks mõõtühikuteks. Loomulikud mõõtühikud on näiteks toll, jard, vaks, miil jne.
Loomulike ühikutega kasutamisega paratamatult kaasnevat segadust iseloomustab lisatud animafilm.
Fundamentaalühikud on üksteisest sõltumatud mõõtühikud, mida saab etalonide abil võimalikult täpselt määrata. Neid on enamasti väga piiratud arv – Rahvusvahelises Mõõtühikute Süsteemis (SI) on kokku 7 fundamentaalühikut.
SI fundamentaalühikutest definitsioonvalemite abil saadud ühikuid, nimetatakse tuletatud ühikuteks. Meile on ehk tuntuim tuletatud ühik on kiiruse ühik. Kiiruse definitsioonvalem on:

kus v – kiirus, s – teepikkus ja t – liikumisaeg. Seega

Kus [v] – kiiruse ühik. [s] – (tee)pikkuse ühik ja [t] – ajaühik. NB! Tuletatud ühiku avaldises tuleks jagatise asemel eelistada korrutisi (sh. astmeid)
Osadele tuletatud ühikutele on antud (enamasti nendes sisalduva tehte keerilisuse tõttu) spetsiaalne nimetus – selliste ühikute kohta öeldakse, et nad on nimega ühikud.
Näiteks jõu ühik njuuton on nimega ühik.
Jõu definitsioonvalem:
kus F – kehale mõjuv jõud, m – keha mass ja a – keha kiirendus (kiiruse muutumist ajas kirjeldav suurus). Sellest tulenevalt jõu ühiku saame kui korrutame massi ühiku (1kg) ja kiirenduse ühiku (1 m/s2).
Saadud korrutist nimetataksegi meile tuntud ühikuks njuuton (1N).
Fundamentaalühikuid ja nendest tuletatud (sh nimega) ühikuid nimetatakse mõnikord koos ka põhiühikuteks.
Rahvusvaheline Mõõtühikute Süsteem (SI)
Rahvusvaheline Mõõtühikute Süsteem (Systéme International d´unités ehk SI) on 1960. aastal ülemaailmselt eelistatuks tunnistatud mõõtühikute süsteem, mille fundamentaalühikuteks on
1) pikkusühik meeter (1m),
2) ajaühik sekund (1s),
3) massiühik kilogramm (1kg),
4) voolutugevuse ühik amper (1A),
5) temperatuuri ühik kelvin(i kraad) (1K),
6) valgustugevuse ühik kandela (1cd) ning neile 1971. aastal lisatud
7) ainehulga ühik mool (1mol).
SI fundamentaalühikute definitsioonid
Pikkusühik meeter (1m) defineeriti 1790. aastal kui 10-7 (kümnemiljondik) Pariisi läbiva meridiaani veerandpikkusest – see tähendab mõõdeti (hinnati ära) Maa ümbermõõt Pariisi kohal ning jagati see siis neljaga – sisuliselt saadi kaugus Pariisi kohal põhjapoolusest ekvaatorini. Tänapäeval kasutatakse meetri etalonina vahemaad, mille läbib valgus vaakumis (299 792 458)-1 ≈ (3∙108)-1 sekundiga.
Ajaühik sekund (1s) definitsioon on pärit tõenäoliselt keskajast ja oli algselt võrdne (86 400)-1 osaga (60 s/min x 60 min/h x 24 h/d) ööpäevast, 1960. sai sekundi definitsiooniks (31 556 925.9747)-1 osa 1900. troopilise aasta pikkusest. Tänapäeval on sekund defineeritud kui ajavahemik, mis võrdub põhikolekus viibiv tseesium-133 aatomi kõige välimise kihi ainsa elektroni ja tuuma vastastikmõjust tingitud kiirguse 9 192 631 770 kordse perioodiga.

Massiühik kilogramm (1kg) on defineeritud kui ühe liitri täiesti puhta 4°C-se vee massile vastava plaatina (90%) ja iriidiumi (10%) sulamist silindri – nn etalonkilogrammi (pildil), mille kõrgus ja läbimõõt on võrdsed 39,17 millimeetriga, massiga.
Temperatuuri ühik kelvin(i kraad) (1K) on (273,15)-1 vee kolmikpunkti temperatuurist. Kolmikpunkt on selline madalaim temperatuur, mille juures vesi esineb korraga kõigis kolmes olekus –tahkes, vedelas ja gaasilises – ehk siis temperatuuril 0°C
Voolutugevuse ühik amper (1A) on sellise muutumatu elektrivoolu tugevus, mis läbides kaht lõpmatult pikka paralleelset kaduvväikese ringikujulise ristlõikega sirgjuhet, mis paiknevad vaakumis teineteisest ühe meetri kaugusel, tekitab nende juhtmete vahel jõu 2∙10–7 njuutonit juhtme iga meetripikkuse lõigu kohta.
Valgustugevuse ühik kandela (1cd) on kiirgusallikast etteantud suunas kiiratud monokromaatse 540∙1012 hertsise kiirgussagedusega ja samas suunas 1/683 vatti steradiaani kohta kiirgustugevust omava kiirguse valgustugevus.
Ainehulga ühik mool (1mol) on ainehulk, milles sisaldub Avogadro arv (6,022∙1023) loendatavat osakest, mis on sama palju kui aatomeid 0,012 kilogrammis süsiniku isotoobis massiarvuga 12.
Kordsed ühikud
SI on detsimaalne süsteem, kus suuremate ja väiksemate ühikute saamiseks kasutatakse kümnendeesliiteid (kümne astmetega korrutamist).
Põhiühikust vastav järkarv arv korda erinevaid ühikuid nimetatakse kordseteks ühikuteks, neid kasutatakse nii kõigi tehet mitte sisaldavate (põhi)ühikute puhul ning neid eristatakse kokkuleppeliste eesliidetega:
| Eesliide | Tähis | Kordaja | Eesliide | Tähis | Kordaja |
| jotta | Y | 1024 | detsi | d | 10-1 |
| zetta | Z | 1021 | senti | c | 10-2 |
| eksa | E | 1018 | milli | m | 10-3 |
| peta | P | 1015 | mikro | µ | 10-6 |
| tera | T | 1012 | nano | n | 10-9 |
| giga | G | 109 | piko | p | 10-12 |
| mega | M | 106 | femto | f | 10-15 |
| kilo | k | 103 | atto | a | 10-18 |
| hekto | h | 102 | zempto | z | 10-21 |
| deka | da | 101 | jokto | y | 10-24 |
|
PÕHIÜHIK |
– |
100 |
|||
Mõõteviga. Mõõtemääramatus.
Kuna mõõtmine toimub alati olukorras, kus protseduuri mõjutavad alati erinevad segavad tegurid, siis pole paratamatult võimalik saada ühtki absoluutselt täpset mõõtmistulemust. Nii kaasneb iga mõõtmisega paratamatult teatav mõõteviga.
See ei tähenda, et me mõõdame valesti – lihtsalt ei ole võimalik põhimõtteliselt teha absoluutselt täpseid mõõtmisi.

Ainsaks “täpse mõõtmise” erandiks on (näiteks traadil istuvate lindude vms) loendamine heades vaatlustingimustes.
Mõõteveaks nimetatakse mõõdetud väärtuse (x0) ja mõõdetava suuruse tõelise väärtuse (x) vahet.

Mida väiksem on mõõteviga, seda täpsem on mõõtmine. Kuna me ei saa põhimõtteliselt kunagi teada mõõdetava suuruse tegelikku väärtust, ei saa me kunagi teada ka tegelikku mõõteviga.
Absoluutne ja suhteline viga. Riistaviga
Absoluutne viga on mõõtmisel tekkinud viga, mis näitab tegeliku ja mõõdetud suuruse vahet.

kus ΔA – absoluutne viga, At – suuruse tegelik väärtus ja Am – suuruse mõõdetud väärtus. Absoluutset viga väljendatakse samades ühikutes kui mõõdetud suurust (pikkust pikkusühikutes, massi massiühikutes, aega ajaühikutes jne)
Suhteline ehk relatiivne viga on absoluutse vea ja mõõteriista näidu suhe protsentides.

kus γ – suhteline viga, ΔA – absoluutne viga ja An – mõõteriista näit.
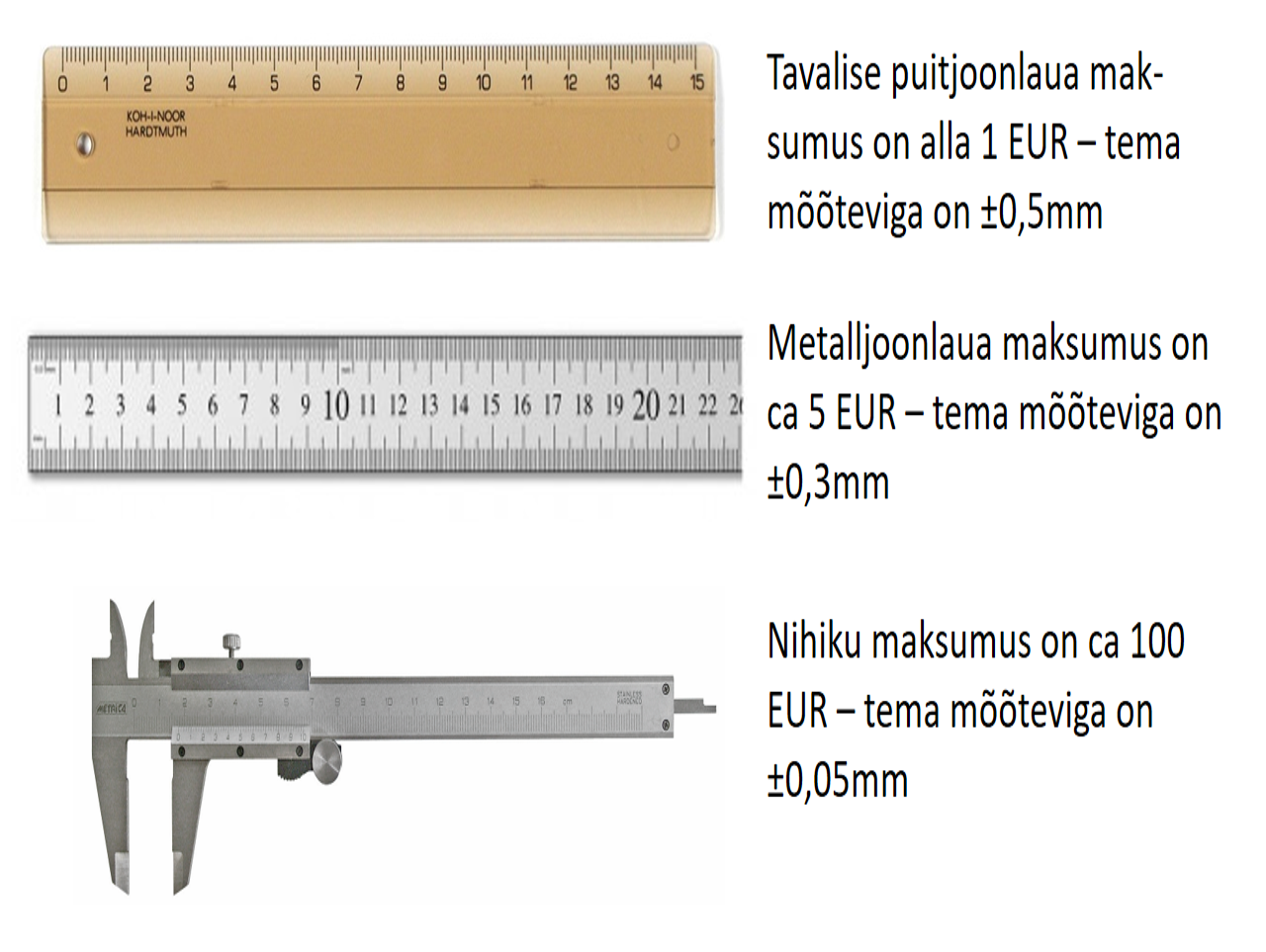
Riistaveaks nimetatakse konkreetse mõõteriista eripärasustest tekkivat mõõteviga. Analoogskaalaga (näiteks joonlaud, ampermeeter vms) mõõteriistade korral loetakse riistavea väärtuseks 1/2 jaotise väärtusest. Digitaalse (numbrilise) skaalaga mõõteriista riistaviga on kirjutatud vastava mõõteriista kasutusjuhendisse.
Mõõteriistade täpsusklassi valikul kehtib “rusikareegel” – vähendades absoluutset viga x korda, suureneb mõõteriista hind x2 korda.
Seega mõõteriista valikul tuleks eelistada võimalikult väikese absoluutse vea poole püüdlemise asemel talutava suurusega – igapäevaste mõõtmiste korral alla 5%, täppismõõtmistel alla 1% – suhtelist viga.
Mõõtevigade allikad
Mõõteveal on kolm võimalikku allikat:
(1) mõõteriist – skaalast tulenevad (skaala jaotised pole ühtlased, osuti ja skaalakriips on lõpliku paksusega), anduritest tulenevad – andurid on muutlikud näit. vedru väsib, temperatuur mõjub; ümardamisest tulenevad – numbrilises riistas toimub näidu ümardamine jpm;
(2) mõõtmisprotseduur – lugemisviga (silma järgi skaalajaotise kümnendkohtade hindamine, parallaks – objekti näiv nihe tausta suhtes vaatleja asendi muutumise tõttu), häireviga (välised elektriväljad, vibratsioon, kõrvaline valgus); lähteviga (kui täpselt kasutame arvutustes konstante); metoodiline viga (valitud meetodi ebatäiuslikkus või arvutusvalemi ligikaudsus) jms ning
(3) mõõdetav objekt ise – paratamatult muutub ka mõõdetav objekt aja jooksul ise (soojuspaisumine, vee aurustumine või kondenseerumine, jms).
Mõõtemääramatus on (väga) paljude mõõtmiste mõõtevigadest statistiliste meetoditega saadud suurus, mis iseloomustab tõenäosuslikult mõõtesuuruse võimalike väärtuste vahemikku.
Mõõtemääramatus on alati suurem kui mõõtmisega kaasnev mõõteviga. Seega, võttes arvesse mõõtemääramatust Δx ja mõõdetud väärtust x0 , asub mõõdetava suuruse tegelik väärtus vahemikus
Tõenäosust, et ükski mõõteviga ei ületa konkreetset mõõtemääramatuse väärtust, nimetatakse mõõtemääramatuse usaldatavuseks ehk usaldusnivooks.
Kui soovime, et usaldusnivoo oleks 100% see tähendab et ühelgi mõõtmisel tehtav viga ei ületaks määrmatust, peame valima mõõtemääramatusele väga suure väärtuse.
Tavaliselt esitatakse mõõtmised usaldusnivooga 68,3% (st 3st mõõtmisest 2 jäävad etteantud vahemikku), eriti suurt täpsust nõudvad mõõtmised aga usaldatavusega 95,4% (st 100st mõõtmisest 95 jäävad etteantud vahemikku).
Kui kordusmõõtmisi tehes saame kogu aeg veidi erinevaid tulemusi, mis varasematega täpselt kokku ei lange, on tegemist A-tüüpi määramatusega ehk juhusliku veaga.
Juhusliku vea vähendamiseks tuleb mõõtmisi korrata võimalikult palju kordi.
Kui kordusmõõtmised annavad alati sama tulemuse, ei saa määramatust hinnata kordusmõõtmisi tehes. Sellisel juhul on tegemist B-tüüpi määramatusega ehk süstemaatilise veaga. B-tüüpi määramatus saadakse muudest allikatest pärineva info põhjal, näiteks kasutades mõõteriista tootja poolt antud mõõteriista täpsuse hinnangut.
Süstemaatilise vea vähendamiseks tuleb kasutada suurema täpsusklassiga mõõteriistu.
A-tüüpi mõõtemääramatuse (juhusliku määramatuse) leidmine. Standardhälve
A-tüüpi mõõtemääramatuse arvutamisel kasutatakse matemaatilise statistika valemeid.
(1) Kui sooritatakse kindel arv n mõõtmisi, mõõteväärtustega x1, x2, x3 … xn, siis väljendab mõõtmistulemuste aritmeetiline keskmine ehk tõenäoliseim väärtus, väärtust mis vastab kõige paremini mõõdetava suuruse tegelikule väärtusele:
(2) Mõõtmiste hajuvust iseloomustatakse dispersiooniga:

(3) Mõõtemääramatus on omakorda seotud standardhälbega:

Ehk kokkuvõtvalt ühe valemina:
Standardhälve täieliku (esindusliku) valimi korral:

kus σN – standardhälve, N – teostatud mõõtmiste arv, xi – katsetes (1, 2, … N) mõõdetud suuruse väärtus ja xt mõõdetud suuruse keskväärtus (suuruse tõenäoliseim väärtus) – seda valemit saab kasutada olukorras, kui absoluutselt kõik mõõtmistulemused on teada ja ei saa esineda ühtegi teist väärtust juba mõõdetutele lisaks. Seda valemit kasutatakse standardhälbe leidmiseks matemaatikas.
Standardhälve mittetäieliku valimi korral:

kus σN – standardhälve, N – teostatud mõõtmiste arv, xi – katsetes (1, 2, … N) mõõdetud suuruse väärtus ja xt mõõdetud suuruse keskväärtus (suuruse tõenäoliseim väärtus) – seda valemit saab kasutada olukorras, kui kõik mõõtmistulemused pole teada see tähendab järgnevad mõõtmised võivad lisada mõõtmistulemuste hulka uusi väärtusi. Füüsikas kasutame standardhälbe arvutamiseks just seda viimast valemit.

Mõõtmistulemuste hajuvust kujutatakse joonisel normaaljaotusena (ka Gaussi kõver) – mida kitsam on see kõver, seda väiksem on tulemuste hajuvus. Standardhälve iseloomustab üksikute mõõteväärtuste juhuslikku hajuvust suuruse keskväärtuse ümber.
Kasutades mõõtemääramatusena standardhälbega võrdset väärtust Δx=σ, saame mõõtmiste normaaljaotusele vastavuse korral usaldusnivooks 68%, mis tähendab, et keskmiselt igal kahel mõõtmisel kolmest esinev mõõteviga on mõõtemääramatusest väiksem või sellega võrdne.
Kui soovime usaldatavust suurendada, tuleb standardhälvet korrutada katteteguriga, mis omakorda sõltub mõõdiste jaotusest ning nõutavast usaldusnivoost. Kui soovime, et mõõtmiste usaldusnivoo oleks 95%, tuleb standardhälvet korrutada kahega (Δx=2σ), kui aga enam kui 99% usaldatavust, siis kolmega (Δx=3σ).
Kui mõõtmisel esineb (ja enamasti esinebki) nii A- (ΔxA) kui B-tüüpi (ΔxB) mõõtemääramatusi, leitakse kogumääramatus (Δx)valemist:

Määramatuse leidmine kaudsel mõõtmisel
Määramatuse leidmiseks kaudsel mõõtmisel:
- Mõõdetakse otseselt suuruse kaudseks mõõtmiseks (arvutamiseks) vajalikud suurused ning arvutatakse nende tõenäoliste suuruste abil mõõdetava suuruse tõenäoliseim väärtus.
- Määratakse kindlaks otseselt mõõdetud suuruste määramatused
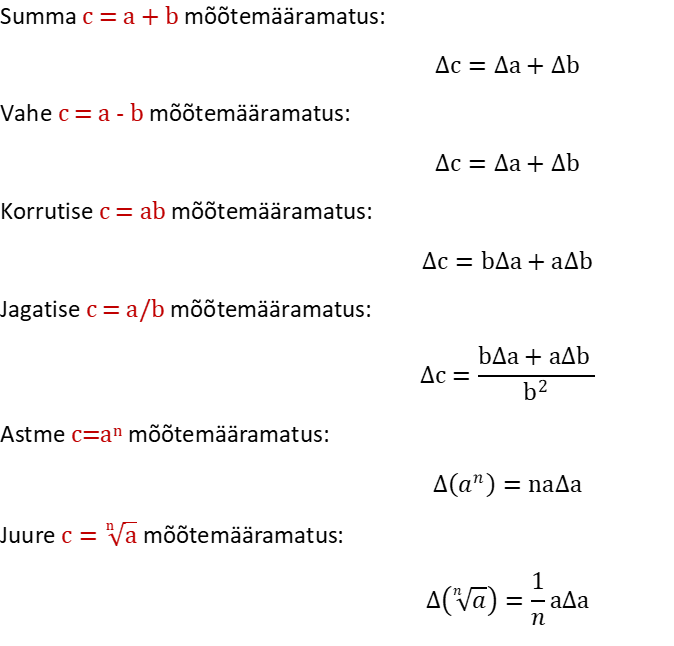
- Kaudselt mõõdetava suuruse määramatuse leidmiseks rakendatakse vastava funktsiooni (liitmine, lahutamine, korrutamine, jagamine jne) määramatuse valemit, millega arvutatakse kaudse suuruse määramatus.
Näide:
(1) Kui a = a0±Δa ja b = b0 ± Δb ning c = ab, siis c = c0 ± Δc, kus
c0=a0b0 ja
Δc=aΔb+bΔa
(2) Kui m = m0±Δm ja n = n0 ± Δn ning w = m/n, siis w = w0 ± Δw, kus
w0=m0/n0 ja
Δw=(mΔn+nΔm)/m2
Mõõtemääramatuste valemid kaudsel mõõtmisel kui otseselt mõõdetud suurused on
a = a0±Δa ja
b = b0 ± Δb
NB! Kaudse mõõtmise tõenäoline väärtus (mis kirjutatakse vahemikuna avaldatavas mõõtmistulemuses ± määramatuse ette) saadakse kui tehakse vastav tehe (liitmine/ lahutamine/ korrutamine jne) otseselt mõõdetud suurus(t)e tõenäolis(t)e väärtustega.
Määramatusega mõõtmistulemuste kujutamine graafikul
Kui otsitakse seost kahe füüsikalise suuruse vahel, siis nimetatakse suurust, millele antakse vabalt valitud väärtusi vabaks muutujaks (matemaatikas tuntud kui x) ning suurust, mis muutub sõltuvalt vabamuutuja väärtusest seotud muutujaks (matemaatikas tuntud kui y).
Seost vaba- ja seotud muutuja vahel on võimalik väljendada valemina (funktsioonina y=f(x), võrrandina, võrrandisüsteemina), aga see esitatakse sageli ka graafikuna, milleks on koordinaadistikul funktsionaalset sõltuvust näitav joon, kusjuures kahemõõtmelise arvtasandi korral kantakse (horisontaalsele) abtsiss-teljele kantakse vabamuutuja (x), (vertikaalsele) ordinaatteljele aga seotud muutuja (y).
Kuna nii vaba- kui seotud muutujad sisaldavad enamasti mõõtemääramatust, ei kanta mõõtmistulemusi arvteljestikku mitte lihtsalt arvutatud suuruse tõenäoliseimale väärtusele vastava punktina, vaid lisatakse sellele nii vaba- kui seotud muutuja määramatusele vastavad lõigud, moodustades taoliselt määramatuse- ehk vearisti. Vearistiga määratletud (ristkülikukujuline) väli kujutab endast punktide hulka, millest igaüks vastab mõõtmisel esinevat määramatust sisaldavale mõõtmistulemusele.
Graafiku joonestamisel ühendatakse pideva sileda joonega (lineaarse sõltuvuse puhul sirgjoonega) mitte mõõdetud suuruste tõenäoliseimad väärtused vaid hoopis vearistid, jälgides, et joon läbiks kõiki veariste ning oleks mõõdetud suuruste tõenäoliseimatele väärtustele võimalikult lähedal.
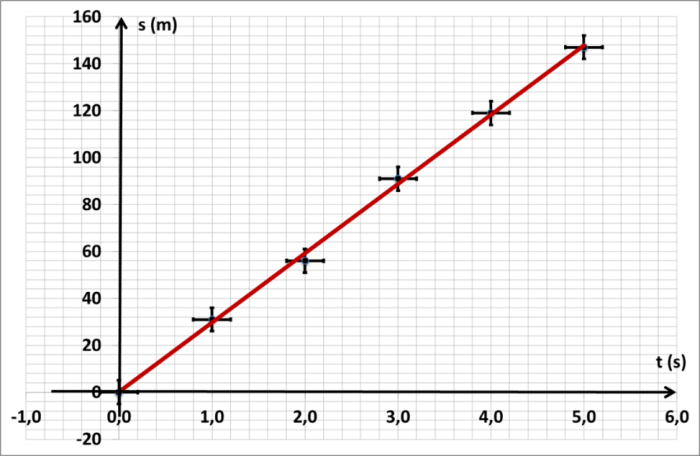
Graafikul on kujutatud seos vabalt valitud ajahetke t, mõõdetuna sekunditses mõõtemääramatusega ±0,2s ning objekti kauguse s, mõõdetuna meetrites mõõtemääramatusega ±4m. Graafikult nähtub, et tegemist on (etteantud määramatusele vastava) ühtlase kiirusega liikuva kehaga.
Tänapäeval kasutatakse graafikute joonestamisel erinevaid arvutiprogramme (nt Microsoft Excel, Libre Office Calc, Google Spreadheet vms).
Kulgliikumise kinemaatika
Mehaanika põhiülesanne
Mehaanika on füüsika haru, mis uurib liikumist, selle olemust ning muutumise põhjusi.
Mehaanika põhiülesandeks on leida keha asukoht mistahes ajahetkel. Mehaanika jaotatakse kolme harusse: (1) kinemaatikaks, (2) dünaamikaks ja (3) staatikaks.
Kinemaatika on mehaanika haru, mis uurib ja kirjeldab kehade liikumist ruumis süvenemata liikumise põhjustesse.
Dünaamika uurib mis on liikumise põhjuseks – kuidas liikumine tekib ning kuidas see erinevate mõjude tagajärjel muutub.
Staatika tegeleb kehade tasakaalutingimuste välja selgitamisega – see tähendab uurib mis tingimustel ja põhjustel kehad ei liigu.
Kinemaatika põhimõisted
Punktmass kui keha mudel
Punktmass on üks enamlevinud füüsika üldmudelitest. Punktmassina kirjeldatakse keha, mille mõõtmed võib antud liikumisoleku juures arvesse võtmata jätta – keha mass kujutatakse koondununa ühte punkti – keha masskeskmesse.

Põhimõtteliselt võib peaaegu iga keha käsitleda punktmassina – see sõltub tema liikumisest ja kehadest, mille suhtes liikumist kirjeldatakse. Näiteks kui kirjeldame veoauto liikumist parklas, siis ei ole võimalik jätta tema mõõtmeid kirjeldamata jätta – auto suurus parkla ja teiste autode suhtes on vägagi oluline. Kui me kirjeldame aga selle auto liikumist Tallinnast Tartusse, pole tema mõõtmed enam olulised ning me saame auto asemel kirjeldada punktmassi liikumist.
Koordinaadid. Taustsüsteem
 Koordinaatide abil määratakse mistahes keha või punkti asukoht ruumis.
Koordinaatide abil määratakse mistahes keha või punkti asukoht ruumis.
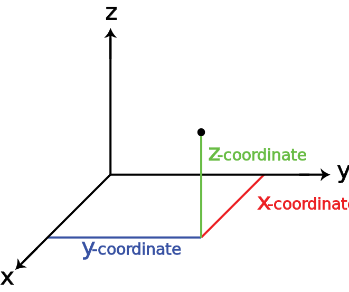
Tavaliselt kasutatakse keha asukoha määramiseks ristkoordinaatide süsteemi, mis moodustub kolmest omavahel ristuvast ruumisihist – x-, y- ja z-teljest.
Kui liikumine toimub mööda sirget või mööda kindlaks määratud trajektoori, piisab keha asukoha kirjeldamiseks ühest koordinaadist – kaugusest koordinaatide või liikumise alguspunktist – tegemist on ühemõõtmelise ruumiga. Kui keha liigub tasandil, on tema asukoht kirjeldatav kahe koordinaadiga – tegemist on kahemõõtmelise ruumiga.

Keha asukoha muutumise kirjeldamiseks kasutatakse aga hoopis taustsüsteemi, mis koosneb: (I) taustkehast, mille suhtes keha asukohta kirjeldatakse; (II) taustkehaga seotud koordinaatsüsteemist ja (III) ajamõõtmise süsteemist (tavaliselt fikseeritakse aja-arvamise alghetk t=0).
Trajektoor. Teepikkus. Nihe
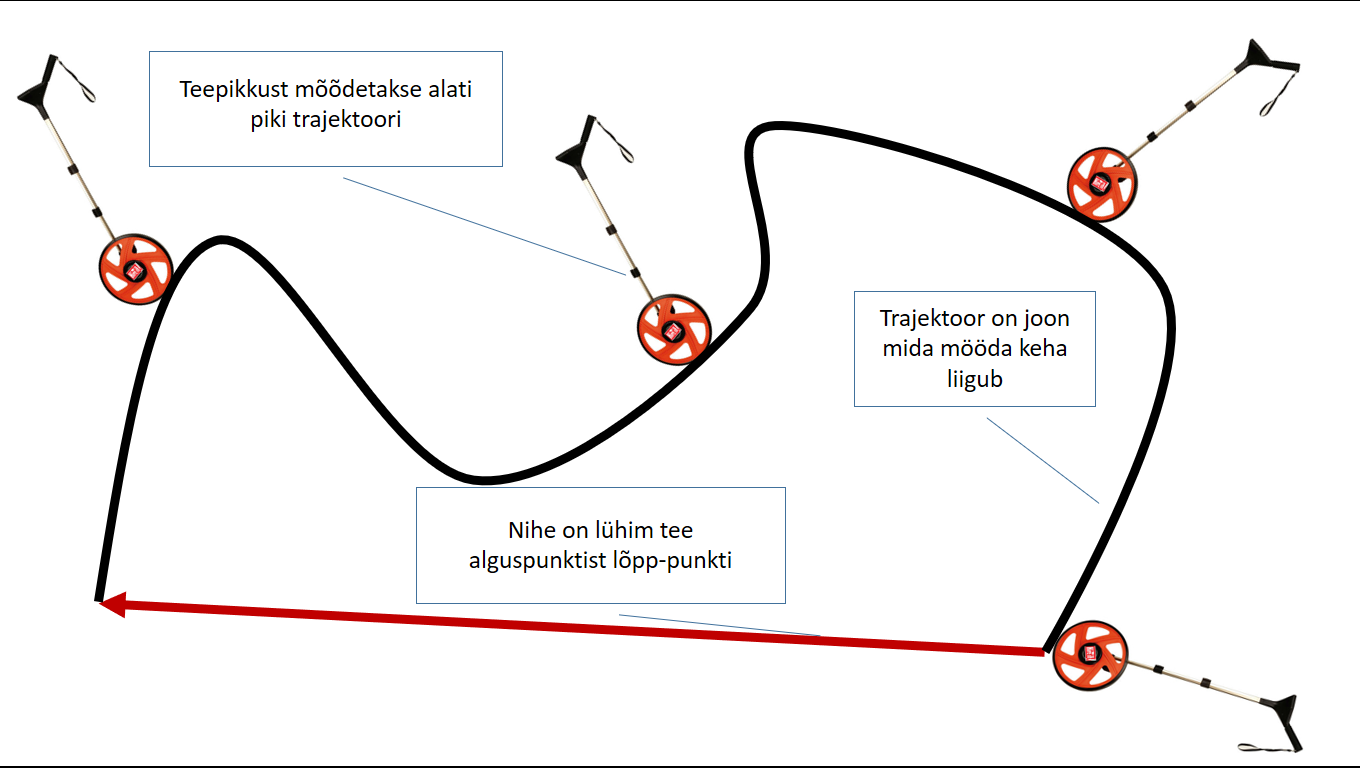
Joont, mida mööda keha liigub nimetatakse trajektooriks. Läbitud trajektoorilõigu pikkust nimetatakse teepikkuseks ehk läbitud teeks. Vektorit, mis ühendab keha liikumise alguspunkti liikumise lõpp-punktiga nimetatakse keha nihkeks.
Keha võib ühest ruumipunktist teise liikuda lõpmata arvu trajektoore mööda, kuid keha nihe on määratletud üheselt liikumise alg- ja lõpp-punktiga. Kuna lühim tee kahe punkti vahel on sirge (vektor on suunatud sirglõik), siis on keha poolt läbitud tee reeglina pikem kui tema poolt sooritatud nihe. Nihe ja teepikkus on omavahel võrdsed vaid siis, kui keha liikumistrajektooriks on sirgjoon.
Mehaaniline liikumine

Mehaaniline liikumine on keha asukoha muutumine aja jooksul teiste kehade suhtes. Mehaaniline liikumine on pidev nii ajas kui ruumis see tähendab, et liikumine võtab alati aega ja keha peab läbima oma teel kõik liikumise algus- ja lõpp-punkti vahele jäävad punktid
Mehaanilise liikumise liigid
 Liikumist, mille korral keha kõik punktid liiguvad ühesuguselt, nimetatakse kulgliikumiseks. Kulgliikumise kirjeldamisel kasutatakse keha (kui kuju ja mõõtmetega objekti) asemel punktmassi.
Liikumist, mille korral keha kõik punktid liiguvad ühesuguselt, nimetatakse kulgliikumiseks. Kulgliikumise kirjeldamisel kasutatakse keha (kui kuju ja mõõtmetega objekti) asemel punktmassi.

Liikumist, mille korral keha kõik punktid liiguvad mööda ringjooni (või kaari) nii, et nende ringjoonte (kaarte) keskpunktid on ühel sirgel ja nende joonte tasandid on sellega risti, nimetatakse pöörlemiseks

Liikumist, mille korral keha kõik punktid liiguvad kindlate ajavahemike tagant sama trajektoori mööda edasi-tagasi, nimetatakse võnkumiseks
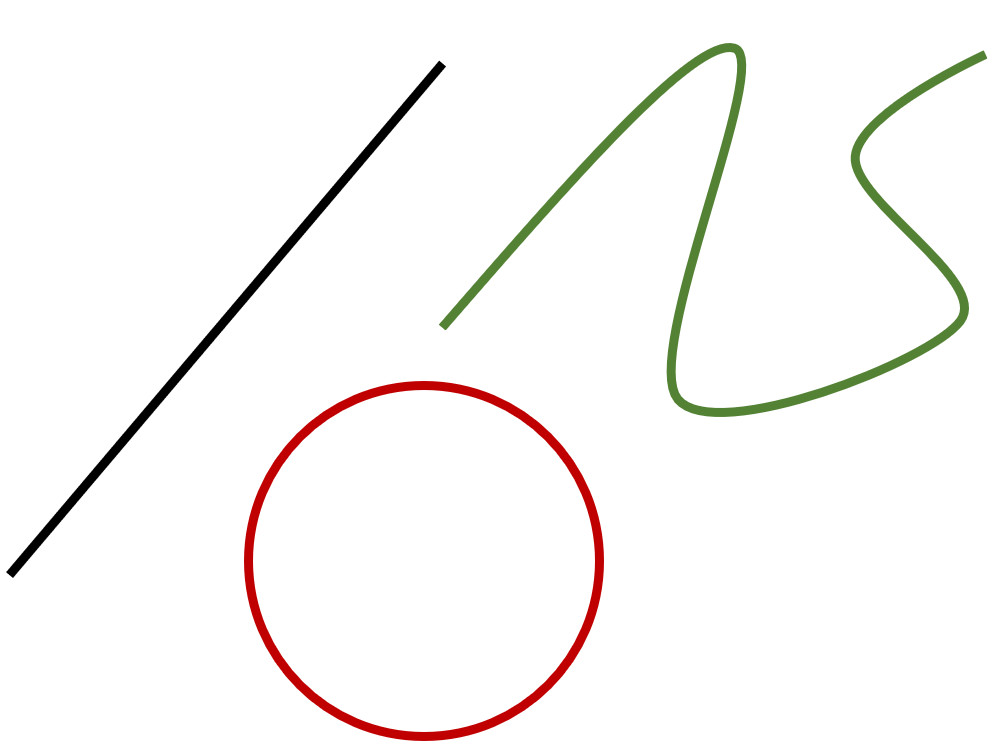
Liikumist on võimalik liigitada ka keha trajektoori kuju järgi sirgjooneliseks kui keha trajektoor on sirgjoon või kõverjooneliseks kui keha trajektoor on kõverjoon.
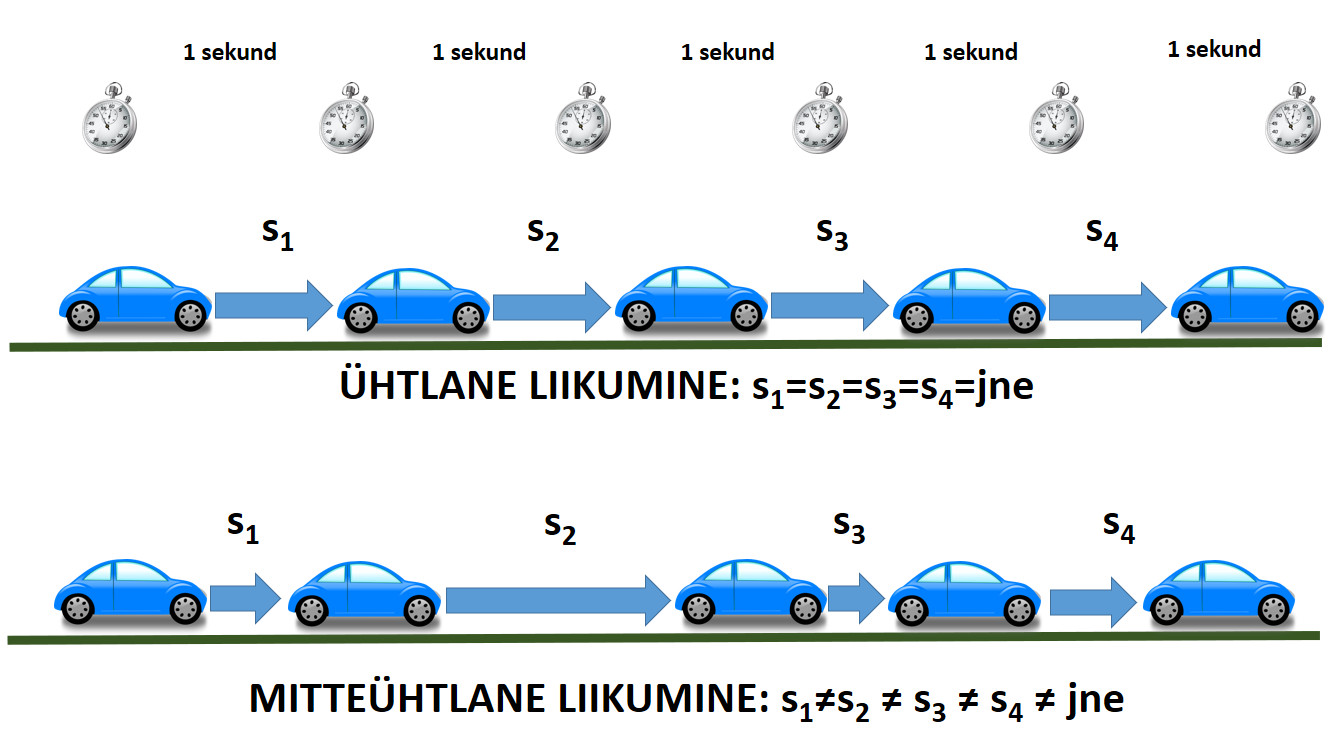
Kui keha läbib mistahes võrdsetes ajavahemikes võrdsed teepikkused, nimetatakse liikumist ühtlaseks liikumiseks, kui aga erinevad teepikkused, siis mitteühtlaseks liikumiseks.
Kiirus
Kiirus (vektor v) on füüsikaline suurus, mis iseloomustab keha poolt ajaühikus sooritatavat nihet (või läbitavat teepikkust). Korrektsuse mõttes tuleks ajaühikus läbitavat teepikkust kirjeldavat suurust nimetada siiski joonkiiruseks.

kus vektor s on keha poolt sooritatud nihe (asukoha muutus ruumis ning vektor s1 ja vektor s2 on keha alg- ja lõppasukoha koordinaatvektorid ning vektor Δs on nende vahe); ∆t nihke sooritamiseks kulunud ajavahemik (vaatluse lõpp- (t2) ja alghetkede (t1) erinevus/vahe ∆t = t2 – t1)
Kiirust mõõdetakse meetrites sekundis [v]=1m/1s = 1 m/s = 1 ms-1
Ühtlasel liikumisel keha kiirus aja jooksul ei muutu.
Kui liikumine on mitteühtlane, siis kasutatakse selle kirjeldamiseks keskmist kiirust, mis iseloomustab millise teepikkuse/nihke läbib keha ajavahemikus keskmiselt. Keskmist kiirust kasutatakse olukorras, kui kus keha liigub mitteõhtlaselt pikema aja jooksul või läbib pikema vahemaa.
Mitteühtlase liikumise kirjeldamiseks kasutatakse ka hetkkiirust, mis iseloomustab keha kiirust kindlal ajahetkel. Hetkkiirust kasutatakse keha liikumise kirjeldamiseks kindlal (ja väga lühikesel) ajahetkel või väga lühikese (ja peaaegu sirgjoonelise) tee läbimisel.
Keskmine kiirus
Keskmise kiiruse leidmiseks tuleb keha poolt läbitud kogunihe (koguteepikkus) jagada kogu teeloleku ajaga:

Keskmine kiirus iseloomustab keha poolt terve liikumise kestel ajaühikus keskmiselt sooritatavat nihet, kusjuures selle nihke suund on liikumise algpunktist liikumise lõpp-punkti suunas.
NB! Võib juhtuda, et keha oma liikumisaja jooksul ei liigu hetkekski keskmise kiirusega – seepärast ei ole keskmine kiirus kuidagigi seotud kiiruste aritmeetilise keskmisega
Hetkkiirus
Hetkkiiruse leidmiseks tuleb valida võimalikult lühike ajahetk, mille jooksul keha kiirus muutuda ei jõua ning kus keha liikumist võib lugeda ühtlaseks ja sirgjooneliseks.

Hetkkiiruse suund (vt joonist) trajektoori mistahes punktis on trajektoori sellele punktile tõmmatud puutuja sihiline
Liikumise suhtelisus
Kuna keha liikumist kirjeldatakse alati teis(t)e keha(de) suhtes, siis on keha liikumine (kiirus) erinevate kehade suhtes erinev. Selle pärast öeldaksegi, et keha liikumine on suhteline.
Erandiks on absoluutkiirusega (ca 3∙108 m/s) liikuvad objektid – nende kiirus on kõigi vaatlejate jaoks ühesugune. Absoluutkiirust nimetatakse mõnikord ka valguse kiiruseks, sest selle kiirusega liigub valgus (aga ka teised elektromagnetlained) vaakumis.
Kiiruste liitmine
Kui keha liigub mingis taustsüsteemis kiirusega ![]() ja see taustsüsteem liigub mingi teise taustsüsteemi suhtes kiirusega
ja see taustsüsteem liigub mingi teise taustsüsteemi suhtes kiirusega ![]() , siis keha kiirus teises taustsüsteemis
, siis keha kiirus teises taustsüsteemis ![]() avaldub:
avaldub:

NB! Kui keha ja taustsüsteem liiguvad sirgjooneliselt ning samas suunas, siis nende kiiruste arvväärtused liidetakse, kui aga vastassuundades, siis lahutatakse.

Kui jalakäija liigub platvormil oleva vaatleja (neiu) suhtes kiirusega v (näiteks 3 m/s), suunaga vaatlejast eemale ja platvorm omakorda maapinnal asuva vaatleja (noormees) suhtes mingi kiirusega (näiteks 5 m/s) vaatleja, siis on taustsüsteemi ja keha kiirused samasuunalised ning jalakäija liigub maapinnal asuva vaatleja suhtes kiirusega, mis on võrdne vastavate kiiruste arvväärtuste summaga (8 m/s)
——————————————————————————–

Kui jalakäija liigub platvormil oleva vaatleja (neiu) suhtes kiirusega v (näiteks 3 m/s), suunaga vaatleja poole ja platvorm omakorda maapinnal asuva vaatleja (noormees) suhtes mingi kiirusega (näiteks 5 m/s) vaatleja, siis on taustsüsteemi ja keha kiirused samasuunalised ning jalakäija liigub maapinnal asuva vaatleja suhtes kiirusega, mis on võrdne vastavate kiiruste arvväärtuste vahega (2 m/s)
Kehade suhteline kiirus
Ühe keha kiirus teise suhtes arvutatakse valemist:

kus v21 on II keha kiirus I keha suhtes, v2 – II keha kiirus paigalseisva taustkeha suhtes; v1 on I keha kiirus paigalseisva taustkeha suhtes. NB! I keha kiirus II suhtes on arvuliselt sama suur, kuid suunalt vastupidine
NB! Kui kehad liiguvad sirgjooneliselt ning samas suunas, siis nende kiiruste arvväärtused lahutatakse, kui aga vastassuundades, siis liidetakse.

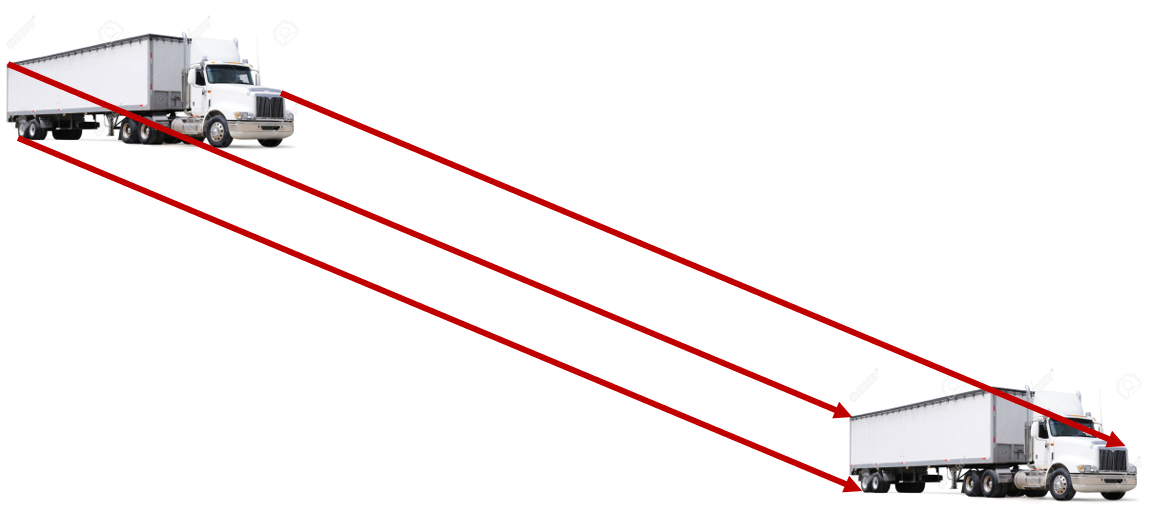
Ülemisel pildil on autode suhteline kiirus 20 km/h, alumisel aga 160 km/h
NB! Nagu öeldud, ei kehti eespool kirjeldatud seosed absoluutkiirusega liikuvate objektide kohta. Pole vahet kuidas liigub vaatleja – kui objekt liigub mingis taustsüsteemis absoluutkiirusega, siis liigub ta absoluutkiirusega ka kõikides teistes taustsüsteemides. Ehk siis sinise auto laternatest lähtunud valgus liigub punases autos (ja ka maapinnal seisva) vaatleja suhtes kiirusega 300 tuh. km/s sõltumata sellest kas punane auto seisab paigal, liigub sinise autoga samas suunas või vastassuunas.
Liikumisvõrrand – kiiruse ja läbitud teepikkuse sõltuvus ajast

Kui keha liigub punktist A punkti B, siis kirjeldab keha asukoha muutumist nihkevektor , mis avaldub keha asukohavektorite ja muuduna:

Nihkevektori koordinaadid Δsx ja Δsy iseloomustavad seda kui palju ja millises suunas keha selle telje sihis liigub.
Kui keha sooritab ajavahemiku Δt jooksul nihke , avaldub keha kiirus:

Kiirusvektori koordinaadid vx ja vy näitavad millise kiirusega ja millises suunas keha selle telje sihis liigub.
Võrrandit, mis kirjeldab keha asukoha (vektori) muutumist ruumis aja jooksul nimetatakse liikumisvõrrandiks. Selle võrrandi graafikut, mida kujutatakse teljestikus, kus aeg on vaba- ja keha asukoht seotud muutuja, nimetatakse keha liikumisgraafikuks.
Keha asukoha(vektori) muutus ajavahemiku ∆t=t2-t1 (t2 – vaatluse lõpphetk, t1 – vaatluse alghetk) jooksul avaldub keha algasukoha ja ajavahemiku jooksul sooritatud nihke kaudu:
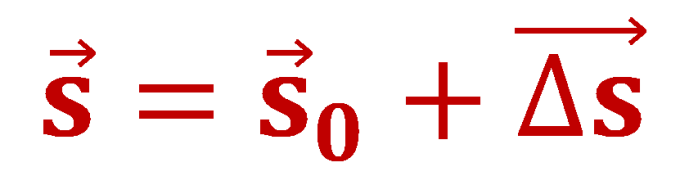
kus – vektor So keha asukoht (kohavektor) vaatluse alghetkel ja – delta S keha poolt sooritatud nihe.
Enamasti väljendatakse liikumisvõrrand mitte vektor- vaid liikumistrajektoori koordinaatvõrrandi(te süsteemi)na

Liikumisvõrrand ühtlasel sirgjoonelisel liikumisel
Sirgjoonelisel liikumisel piisab keha asukoha täielikuks kirjeldamiseks ühes koordinaadist (liikumine toimub ühemõõtmelises ruumis), seega piisab liikumisvõrrandi kirjeldamiseks ühest koordinaatvõrrandist:
Liikumisgraafik ühtlasel sirgjoonelisel liikumisel
Liikumisvõrrandist saadavat graafikut, kus aeg on vabamuutujaks ning keha asukoht (asukoha koordinaat) seotud muutujaks nimetatakse liikumisgraafikuks. Ühtlasel sirgjoonelisel liikumisel on liikumisvõrrandiks lineaarvõrrand – vabamuutuja (t) on võrrandis astmes +1 – järelikult on ühtlase sirgjoonelise liikumise graafikuks sirgjoon.
Graafiku ordinaattelje (x-telje) lõikepunkt tähistab tavaliselt (eeldusel, et koordinaattelgede lõikepunktis on nii aeg kui ruumikoordinaat võrdsed nulliga) keha algasukohta.
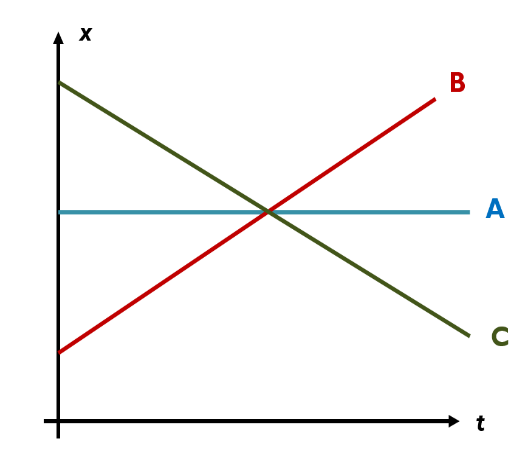
Kui liikumisgraafik on horisontaalne sirge (joon A), siis keha seisab paigal.
Kui liikumisgraafik on tõusev sirge (joon B), siis liigub keha valitud telje suunaliselt. Tavaliselt valitakse telje suunaks vaatleja vaatesuund, joonisel kujutatakse positiivse suunana tavaliselt suunda vasakult paremale.
Kui liikumisgraafik on langev sirge (joon C), siis liigub keha valitud teljele vastassuunaliselt. Seega liigub taolise graafikuga kujutatud keha vaatesuunale vastassuunas, joonisel kujutatakse „negatiivses suunas“ liikuvat keha liikumas paremalt vasakule.
Ühtlaselt muutuv liikumine. Kiirendus
Kui keha läbiv mistahes võrdsetes ajavahemikes mittevõrdsed teepikkused, nimetatakse liikumist mitteühtlaseks liikumiseks.

Mitteühtlase liikumise erivormiks on ühtlaselt muutuv liikumine. Ühtlaselt muutuvaks liikumiseks nimetatakse liikumist, kus keha kiirus muutub (kasvab või kahaneb) mistahes võrdsetes ajavahemikes sama palju.
Ühtlaselt muutuvat liikumist iseloomustataksegi kiiruse muutumist iseloomustava suuruse – kiirenduse – abil. Kiirendus on füüsikaline suurus, mis iseloomustab keha kiiruse muutumist ajas. Sisuliselt on tegemist kiiruse muutumise kiirusega.

kus – vektor a kiirendus, ja vastavalt vektor v2 lõppkiirus ja vektor v1 algkiirus ning ∆t – kiiruse muutumiseks kulunud ajavahemik.
Kiirenduse ühik:

Loe: meetrit sekund-ruudu kohta või meetrit sekundis sekundi kohta
Kiiruse võrrand ühtlaselt muutuval liikumisel
Kiiruse võrrand on vektorvõrrand, mis kirjeldab keha kiiruse muutumist ajas:

kus (tasandil) – vektor v keha kiirusvektor (kiirus) suvaliselt ajahetkel t, – vektor v0 keha kiirus vaatluse alghetkel (algkiirus) ja – vektor Δv ajavahemikul Δt aset leidnud kiiruse muutus, mis ühtlaselt muutuva liikumise korral avaldub omakorda keha kiirenduse kaudu .
Enamasti väljendatakse kiiruse võrrand mitte vektor- vaid koordinaatvõrrandi(te süsteemi)na
Sirgjoonelise liikumise korral (ühemõõtmelises ruumis) piisab kiiruse muutumise kirjeldamisel ühest võrrandist – x-koordinaadi jaoks. Võttes arvesse, et
ehk
ning lugedes liikumise alghetke t0=0 ning keha algkiiruseks v1x=v0x, saame keha kiiruse vx=v2x suvalisel ajahetkel t2=t leida valemist (kiiruse võrrandist):
Ühtlaselt muutuva liikumise kiiruse võrrand on samuti lineaarvõrrand, sest vabamuutuja (aeg) on astmes +1 ning tema graafikuks on sirgjoon.
Graafiku ja ordinaattelje (vx-telje) lõikepunkt tähistab tavaliselt, eeldusel, et koordinaattelgede lõikepunktis on nii aeg kui kiirus võrdsed nulliga keha algkiirust.

Kui kiirusegraafik on horisontaalne sirge (joon A), siis keha kiirus ei muutu – keha liigub ühtlase kiirusega.
Kui kiiruse graafik on tõusev sirge (joon B), siis keha kiirus aja jooksul kasvab – keha liigub kiirenevalt.
Kui kiiruse graafik on langev sirge (joon C), siis keha kiirus aja jooksul väheneb – keha liigub aeglustuvalt.


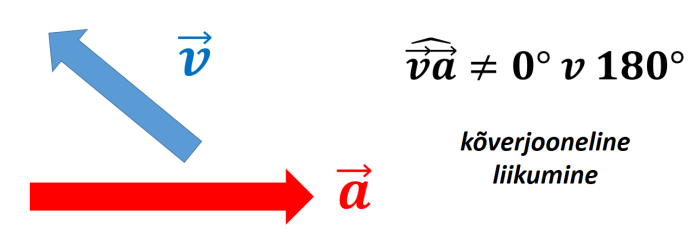
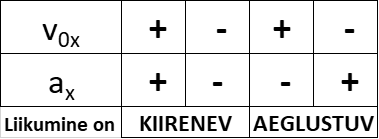
Keha liigub kiirenevalt siis, kui keha (alg)kiiruse ja kiirenduse vektorid on samasuunalised ning aeglustuvalt kui nad on vastassuunalised. Kui kiirus- ja kiirendus on teineteise suhtes nurga all, on keha liikumine kõverjooneline.
Kiiruse- ja kiirenduse koordinaatides väljendub kiirenev liikumine selles, kui nii kiiruse kui ka kiirenduse koordinaadid on samamärgilised, kui nad on erimärgilised, on tegu aeglustuva liikumisega.
Kiiruse graafik ja läbitud teepikkus/nihe
Liikugu keha ajavahemikul Δt=t2-t1 ühtlase kiirusega v0x. Sellise liikumise korral on keha kiiruse võrrand, vx=v0x, sest ühtlasel liikumisel ax=0 ja vx=v0x ning selle kiiruse graafikuks on ajateljega horisontaalne sirge.

Markeerime abijoontega vaatluse alg- ja lõpphetked ning märkame, et graafiku alla abijoonte vahele jäävaks kujundiks on ristkülik. Arvutame selle kujundi pindala.
Ristküliku pindala avaldub teatavasti külgede pikkuste korrutisega. Meie ristküliku ühe külje pikkus on võrdne keha kiirusega (vx) ja teise külje pikkus ajavahemikuga (Δt). Seega:
S=vx∙Δt.
Märkame, et kiiruse ja ajavahemiku korrutis on võrdne keha poolt läbitud teepikkusega (sooritatud nihkega).
Taolist, kiiruse (või muu suuruse) graafiku alla jääva kujundi pindala kaudu teepikkuse (või muu suuruse) leidmist nimetatakse graafilise integreerimise meetodiks.
Nihe ühtlaselt muutuval sirgjoonelisel liikumisel
Leiame graafilise integreerimise meetodi abil valemi nihke leidmiseks ühtlaselt muutuval sirgjoonelisel liikumisel.
Kiiruse võrrand ühtlaselt muutuval sirgjoonelisel liikumisel on:
Vaatleme olukorda, kus keha liigub kiirenevalt st v0x>0 ja ax>0. Rõhutagem siinjuures, et samale tulemusele jõuaksime ka aeglustuva liikumise korral. Kirjeldatud juhtumil on kiiruse graafikuks tõusev sirge.
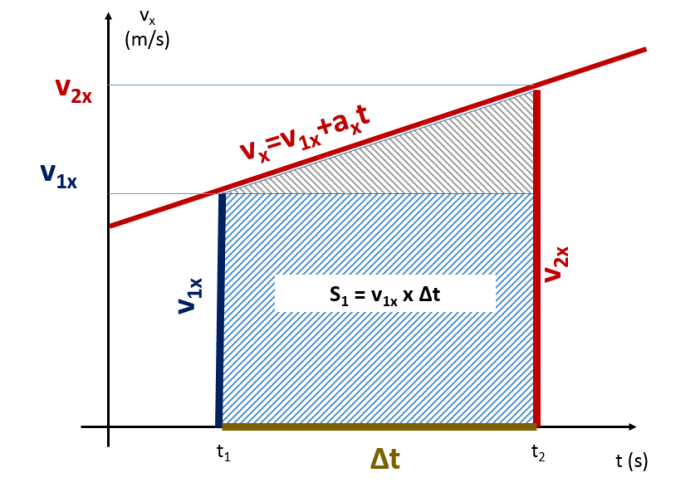
Seega kiireneva liikumise korral tekib ajavahemiku Δt = t2 – t1 korral kiiruse graafiku alla trapets, mille alusteks on vastavalt kiirused ajahetkedel t1 (v1x, algkiirus) ja t2 (v2x, lõppkiirus) ning kõrguseks ajavahemik ∆t.
Trapetsi pindala leitakse valemist, kus aluste poolsumma korrutatakse trapetsi kõrgusega

Meie juhtumil on alusteks alg- ja lõppkiiruse koordinaadid ning kõrguseks liikumisaeg:
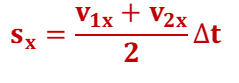
Laskumata pikemalt valemite tuletamise üksikasjadesse saab näidata, et teepikkust (nihet) saab arvutada ka valemitest
Liikumisvõrrand ühtlaselt muutuval sirgjoonelisel liikumisel
Liikumisvõrrand on vektorvõrrand, mis kirjeldab keha asukoha muutumist ajas:
kus sirgel – keha asukohavektor (asukoht) suvaliselt ajahetkel t, – keha asukoht (kohavektor) vaatluse alghetkel ja – keha poolt ajavahemikul Δt sooritatud nihe, mis ühtlaselt muutuva liikumise korral avaldub omakorda
Võttes vaatluse alghetke t1 = 0 ning tähistades suvalise lõpphetke t2 = t (ehk Δt = t), saame sirgjoonel ühtlaselt muutuva kiirusega liikuva keha liikumisvõrrandiks
Liikumisgraafik ühtlaselt muutuval sirgjoonelisel liikumisel
Liikumisvõrrandist saadavat graafikut, kus aeg on vabamuutujaks ning keha asukoht (asukoha koordinaat) seotud muutujaks nimetatakse liikumisgraafikuks.
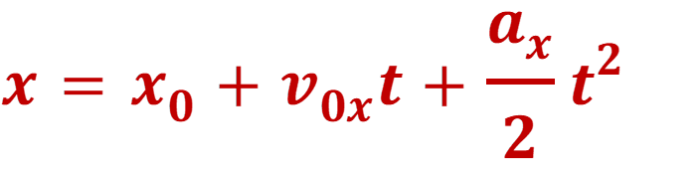
Ühtlaselt muutuvalt sirgjooneliselt liikuva keha liikumisvõrrand on:
Seega on ühtlaselt muutuval sirgjoonelisel liikumisel liikumisvõrrandiks ruutvõrrand – vabamuutuja (t) on võrrandis astmes +2 – järelikult on ühtlaselt muutuva sirgjoonelise liikumise graafikuks parabool.
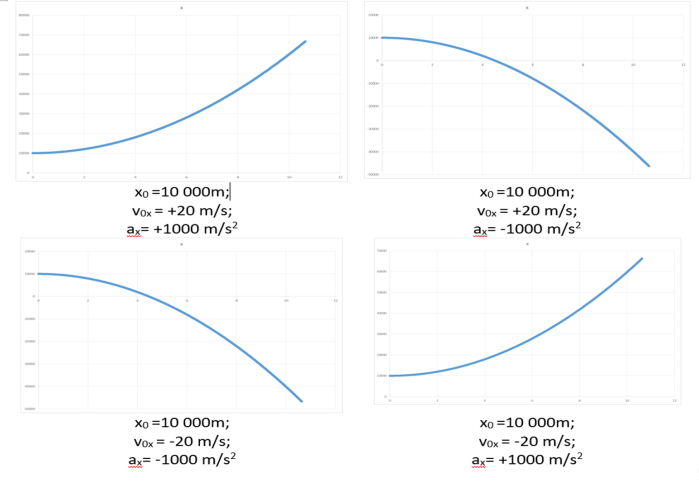
Joonistel on näha, et liikumisgraafiku ja ordinaattelje (vertikaalne, x-telg) lõikepunktiks on keha algasukoha koordinaat (x0). Parabool avaneb üles kui ax>0 ning alla kui ax<0.

You must be logged in to post a comment.